





























6.2.2. Center of mass and tool center point
The following table contains Center of mass and TCP for AirPick with and without the available suction cup kits.
Products
Center of mass (mm)
TCP (mm)
Mass
(g)
X
Y
Z
X
Y
Z
AirPick (without suction cups)
-0.5
-9.0
21.0
0.0
0.0
44.7
545
AirPick (with one suction cup)
-0.5
-8.5
23.4
0.0
0.0
76.7
580
AirPick (with two suction cups)
-0.3
-5.1
40.3
0.0
0.0
127.7
955
AirPick (With four suction cups)
-0.2
14.0
45.6
0.0
0.0
127.7
1100
Table 6-4: Center of mass and tool center point matrix.
Info
For TCP and center of mass of the AirPick used in combination with other Robotiq products, please consult the specific
table provided on our
.
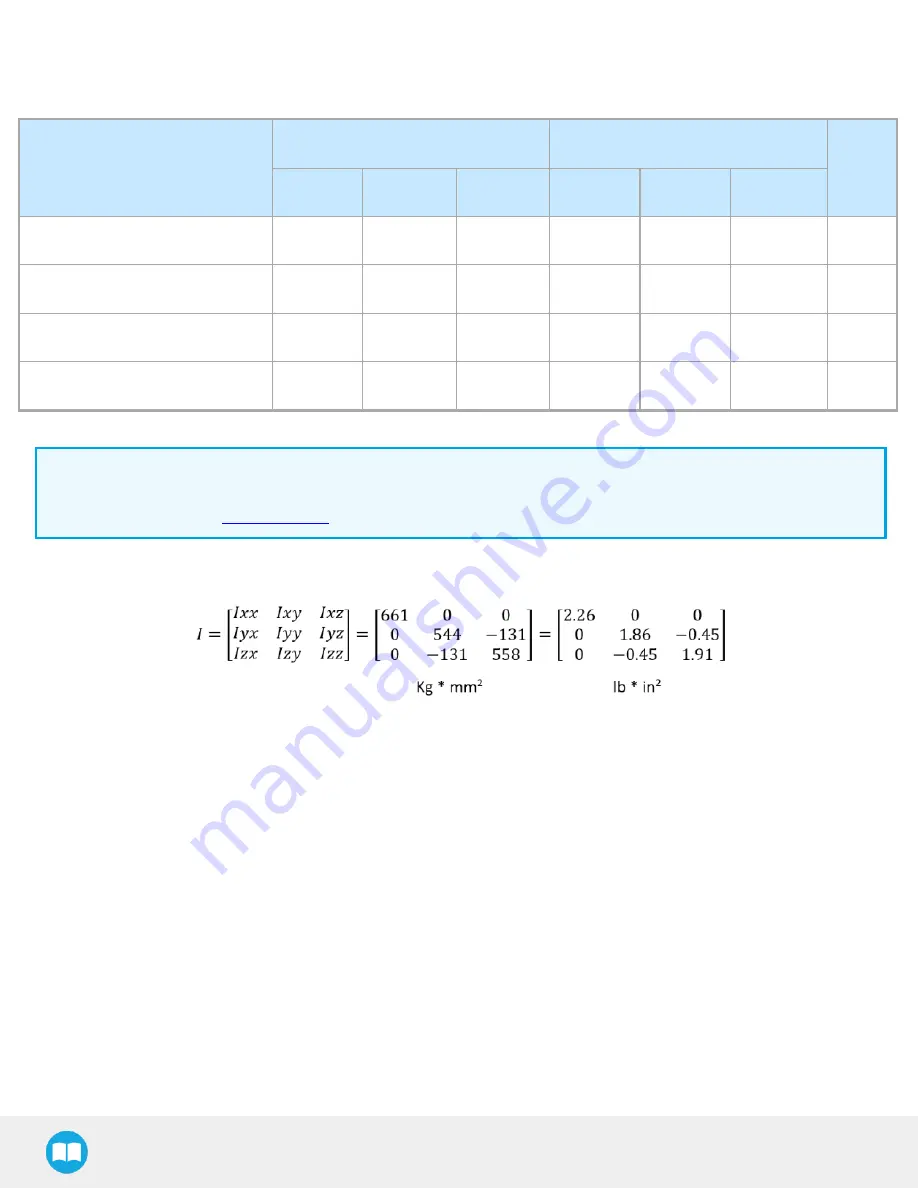
The coordinate system used to calculate the moment of inertia and center of mass of the Vacuum Gripper is shown in the figure
below.
Fig. 6-13: Inertia matrix for AirPick Gripper.
88
Summary of Contents for AirPick
Page 25: ...Fig 3 7 Mounting air nodes suction cups air bolts air nuts on the bracket 25...
Page 27: ...Fig 3 9 Robotiq Vacuum Gripper with pigtail cable and device cable wiring scheme 27...
Page 35: ...Fig 4 1 Vacuum Gripper control logic overview 35...
Page 57: ...7 Click on the New Project icon in the upper left corner of the screen 57...
Page 58: ...AirPick Instruction Manual 8 Enter a name for your program and click on the OK button 9 58...
Page 76: ...Fig 6 5 Minimum and maximum arrangement possibilities of the air nodes position 76...
Page 77: ...AirPick Instruction Manual 6 1 3 Air nodes Fig 6 6 Air nodes dimensions 77...
Page 103: ...AirPick Instruction Manual 12 Appendix Fig 12 1 Pneumatic schema of the AirPick Vacuum Gripper...

































































