





























RAINBOW ROBOTICS
RB SERIES _ USER MANUAL
© RAINBOW ROBOTICS Inc. All rights reserved.
54
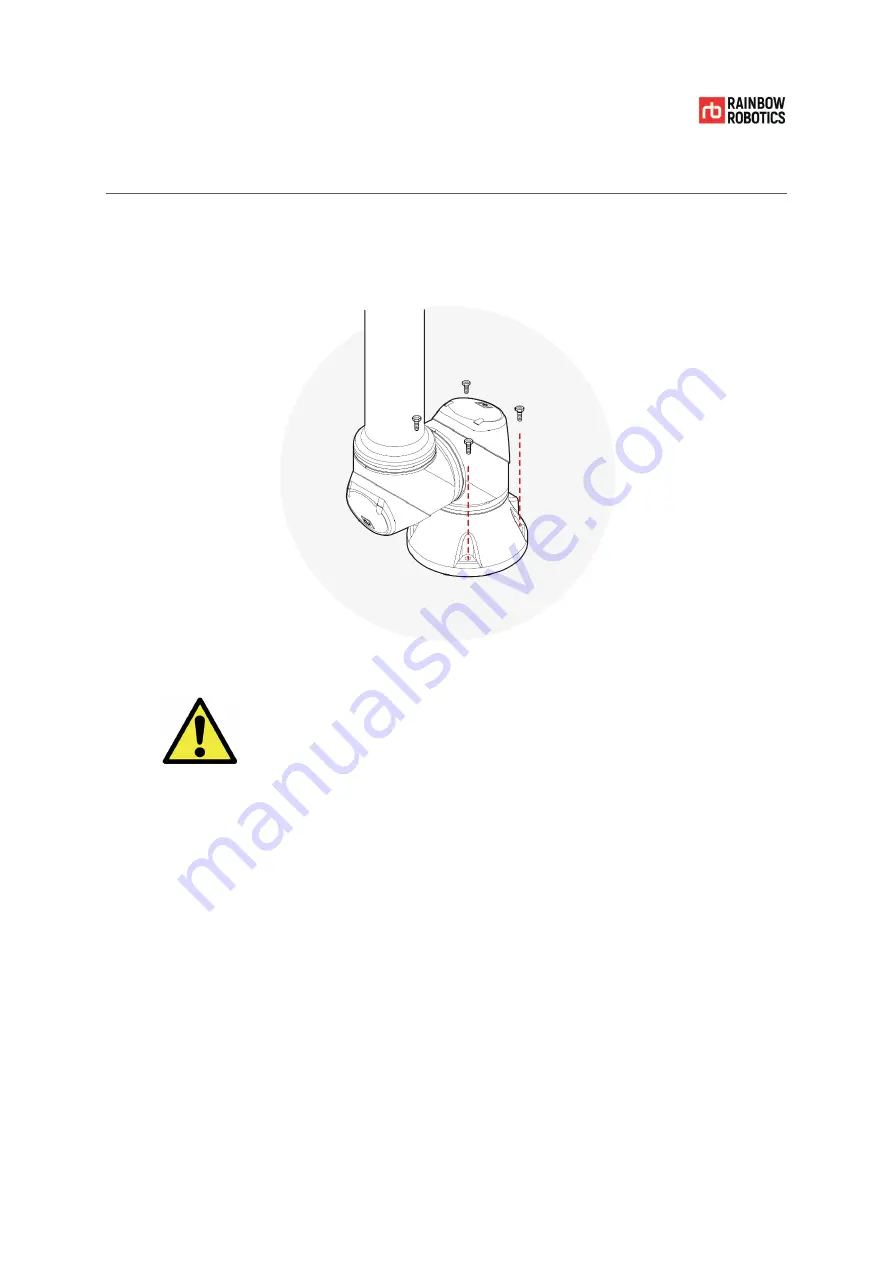
4.4
MOUNTING
THE
ROBOT
It is recommended to use four M8 30mm bolts for robot arm installation.
Warning
Warning:
1)
When attaching the robot, fix it firmly so that the bolts do not come loose.
2)
Install the robot on a sturdy base that can withstand the combined weight of the
robot and the load generated by the robot.
3)
Make sure that the contacting surface on the robot arm is completely in contact
with the surface that it is mounted upon.
4)
Never disassemble the bolts that are assembled in the robot. Ensure that all bolts
are securely fastened before operating the robot arm.
5)
If the product is used with the bolts disassembled, or if a bracket etc. is installed
incorrectly, the product may become damaged, or the safety of the user may be
seriously affected.
Summary of Contents for RB Series
Page 1: ...RAINBOw English RB SERIES USER MANUAL V 3 9 1 Update 2021 09...
Page 2: ...RAINBOW ROBOTICS RB SERIES _ USER MANUAL RAINBOW ROBOTICS Inc All rights reserved 2...
Page 195: ...RAINBOW ROBOTICS RB SERIES _ USER MANUAL RAINBOW ROBOTICS Inc All rights reserved 195...
Page 206: ...RAINBOW ROBOTICS RB SERIES _ USER MANUAL RAINBOW ROBOTICS Inc All rights reserved 206...
Page 265: ...RAINBOW ROBOTICS RB SERIES _ USER MANUAL RAINBOW ROBOTICS Inc All rights reserved 265...




































































