





























37
03
| System Specifications and Interfaces
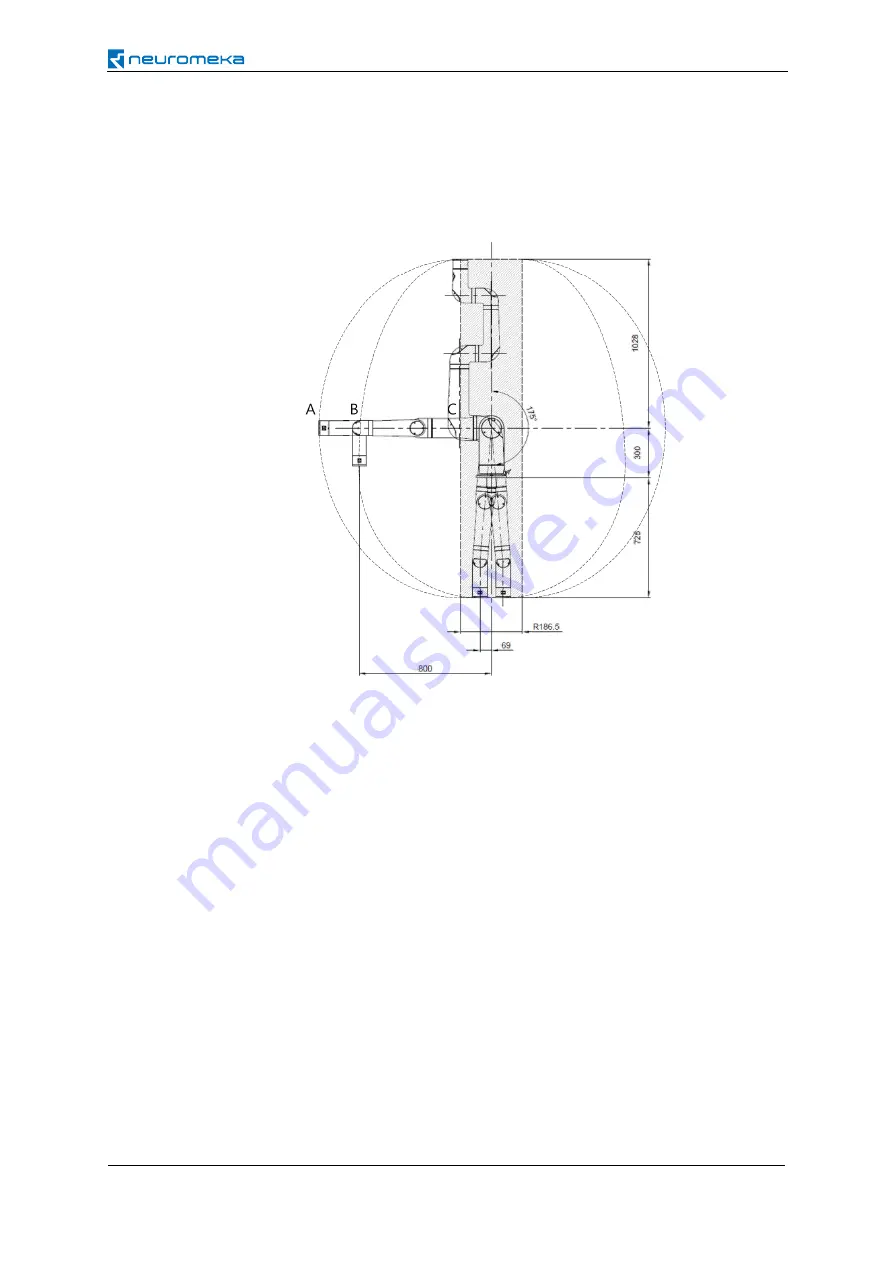
Workspace
The radius that can be reached with the fully extended arm is 1,028 mm, while the maximum radius
with maximum allowable load is 800 mm. However, the radius of 186.5mm around the rotation
axis of the robot base is the area where the end of the robot cannot reach due to the structure.
A: The area where the end of the robot reaches when there is no payload
B: The area where the robot end reaches with the maximum payload condition
C: The area where the end of the robot cannot reach
Singularity and Singularity Region
Unlike the joint motion of the robot that moves joints with respect to the joint space (e.g. in terms
of the joint angle values), the robot's motion that moves the tool with respect to the three-
dimensional Cartesian coordinate system has a position, where the robot cannot move in arbitrary
direction, linearly or rotationally, within the workspace. This is a physical phenomenon where the
robot can no longer be translated or rotated in a particular direction of the Cartesian coordinate
system due to the restrictions on the kinematic or control algorithms of the robot arm. These
positions are called singularities. Furthermore, the closer to the singular point, the greater the joint
acceleration of some specific joints, which results in reaching the limit of the motor capacity. The
singularity region is referred to as the neighborhood of a singularity which causes violation of
motor capacities with abnormally fast motion.
Therefore, when the robot is operated with respect to the Cartesian coordinate system, which we
call frame or task move hereinafter, the robot stops its motion with an alarm upon approaching a
singularity region in order to prevent safety accidents from sudden rotation of some joints in the
singularity region.
Summary of Contents for INDY7
Page 1: ...Version 2 3 0 2019 08 16...
Page 2: ......
Page 3: ......
Page 5: ...5...
Page 8: ......
Page 12: ......
Page 15: ......
Page 128: ...128 05 Programming Now your jointMove setup is complete...
Page 144: ...144 05 Programming Now the setting for the blending of frameMove is completed...
Page 152: ...152 05 Programming Now your home movement setup is complete...
Page 162: ...162 05 Programming stop It stops program execution No setup is required...
Page 257: ...257 The commands that can be executed by the digital input signals are listed as follows...
Page 279: ...279 If you run Conty again the language is changed and shown as follows...
Page 321: ...321 09 Certification 9 Certification 9 1 Machinery Directive...
Page 322: ...322 09 Certification 9 2 Electromagnetic Compatibility Directive...





















































