





























16
JVL Industri Elektronik A/S - User Manual - Ethernet for MAC and MIS motors
2.1
Hardware introduction
2.1.1
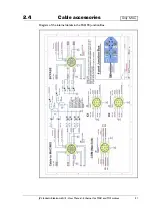
Overall hardware description
All internal and external main connections can be seen in the illustration below.
P+
CVI
P+
P-
P-
5V
O+
IN1
IO
-
O1
Rx1P
Rx0P
Rx1N
Rx0N
Tx
1P
Tx
0P
Tx
1N
Tx
0N
Tx
Rx
O1
Fx
4
IO
1
4-
Fx1
3-
RX
O2
A1/
B1
A2/
B2
TX
GN
D
GN
D
4 I
nputs
4
3
4
2 O
utpu
ts
RS
232
se
ria
l i
nt
erf
ac
e
Contro
l
core
incl
8Mb RAM
4Mb
Fl
as
h
Power su
pply fo
r
the mo
dule
“PWR”
Po
w
er
s
up
pl
y
M
A
C
400
/8
00
: +
24V
“I/
O
”
D
igital
in
puts a
nd ou
tput
s
Vo
ltag
e r
an
ge 5-
28
(3
2)
V
“L/A IN
”
Pr
im
ar
y
Et
he
rN
et
In
ter
fa
ce
M12
fe
m
al
e
con
nect
or
“L/A O
U
T”
Se
co
nd
ar
y
Et
he
rN
et
In
ter
fa
ce
M12
fe
m
al
e
con
nect
or
T
T
30
03G
B
MA
C00-Ex4 e
xpansion
m
odu
le
Basic M
A
C
mo
tor
(MA
C
40
0 or 8
00)
Po
we
r supp
ly
In
te
rnal po
w
er
supp
ly
(p
ro
ce
ss
or
an
d
en
co
de
r)
M
ultif
unction I/O1
(s
et
up
as
“s
er
ial d
ata”)
M
ultif
unction I/O2
H
igh sp
ee
d sync. 0
/1
O
pt
io
na
l I/O us
e
In
te
rn
al
COM
Sta
tu
s o
utp
ut
s
Asy
nc
hr
onous
in
te
rf
ac
e (5
V)
AI
N
1
AI
N
2
Analogue inputs
AIN1=Zer
o se
ar
ch
inpu
t
±10
V n
om.
or up to
32V
8
2
2
2
2
3
3
3
3
4
4
4
4
6
5
5
7
1
1
1
1
Se
e n
ote
1
Se
e n
ote
1
Se
e no
te
1
Se
e n
ot
e1
No
te
1:
Thes
e s
igna
ls
are i
nternall
y a
vila
ble
. Cus
tom
hardw
are c
an
be
mad
e
fo
r OEM
appl.
wi
th
o
ther c
on
ne
ctors
in o
rd
er to m
ak
e the
si
gn
al
s a
va
ilab
le
.
Co
ntact
y
ou
r J
VL
re
present
ati
ve for mo
re in
formatio
n.
Opt
oc
ou
pl
er
Is
olatio
n zo
ne
2
Eac
h i
so
lati
on
z
one
do
not ha
ve
gal
van
ic
c
ont
ac
t
wi
th an
y
ot
her c
irc
ui
try
.
Is
ol
ation zone 3
Is
ol
ation zone 4
Only MAC
Summary of Contents for MAC00-EC4
Page 2: ......
Page 14: ...14 JVL Industri Elektronik A S User Manual Ethernet expansion modules for MAC motors ...
Page 32: ...32 JVL Industri Elektronik A S User Manual Ethernet for MAC and MIS motors ...
Page 78: ...78 JVL Industri Elektronik A S User Manual Ethernet for MAC and MIS motors ...
Page 136: ...136 JVL Industri Elektronik A S User Manual Ethernet for MAC and MIS motors ...
Page 176: ...176 JVL Industri Elektronik A S User Manual Ethernet for MAC and MIS motors ...
Page 177: ...JVL Industri Elektronik A S User Manual Ethernet for MAC and MIS motors 177 8 Sercos ...
Page 224: ...224 JVL Industri Elektronik A S User Manual Ethernet for MAC and MIS motors ...
Page 241: ...JVL Industri Elektronik A S User Manual Ethernet for MAC and MIS motors 241 ...
Page 252: ...252 JVL Industri Elektronik A S User Manual Ethernet for MAC and MIS motors ...
Page 256: ...256 JVL Industri Elektronik A S User Manual Ethernet for MAC and MIS motors ...
Page 257: ...JVL Industri Elektronik A S User Manual Ethernet for MAC and MIS motors 257 12 Appendix ...







































































