




























57
ADVANCED USER GUIDE
IP66/Nema 4X variable speed drive
MENU 5: MOTOR CONTROL
CONTROL TECHNIQUES
3854 en - 03.2008 / b
: Autotune
Adjustment range : 0 to 2
Factory setting
: 0
• The measurement taken when
5.12
= 2 should be
taken with the motor uncoupled since the variable
speed drive drives the motor at 2/3 of its rated speed.
Check that this operation does not present any risk to
safety, and ensure that the motor is stopped before the
autotune procedure.
• After modifying the motor parameters, repeat
autotuning.
0 (Off) (no): No autotune
1 (Stationary) (StoP): Measurement of motor characteristics
when stopped.
The stator resistance and the voltage offset are stored in
5.17
and
5.23
respectively.
Procedure:
- Ensure that the motor parameters have been configured and
that the motor is stopped.
- Unlock the drive.
- Give a run command. The display indicates "Auto" and
"tunE" alternately. Wait for the display to stabilise at 0.
- Disable the drive and remove the run command.
The motor is then ready to operate normally.
Parameter
5.12
returns to 0 as soon as autotuning is
complete.
WARNING:
This autotuning is performed automatically even though
5.12
= 0, in the following cases:
- initial drive commissioning
- return to factory settings, after the drive has been
unlocked and a run command given
2 (Rotating) (rot): Measurement of motor characteristics
while rotating.
The stator resistance and the voltage offset are stored in
5.17
and
5.23
respectively, and the reactive current and
leakage inductance are used to calculate the power factor
5.10
. This mode is used to obtain optimum performance.
Procedure:
- Ensure that the motor parameters have been configured and
that the motor is stopped.
- Unlock the drive.
- Give a run command. The motor accelerates up to 2/3 of
rated speed, then performs a freewheel stop. During
autotuning, the display indicates "Auto" and "tunE"
alternately. Wait for the display to stabilise at 0.
Disable the drive and remove the run command.
The motor is then ready to operate normally.
Parameter
5.12
returns to 0 as soon as autotuning is
complete.
: Dynamic V to F
Adjustment range : 0 or 1
Factory setting
: 0
0 (Linear) (Lin): The V/F ratio is fixed and set by the base
frequency (
5.06
).
1 (Dynamic) (dyn): Dynamic V/F ratio.
Generates a voltage/frequency characteristic which varies
with the load. It is for use in quadratic torque applications
(pumps/fans/compressors). It can be used in constant torque
applications with low dynamics to reduce motor noise.
: Open loop mode select
Adjustment range : 0 to 5
Factory setting
: 3
Determines the open loop control mode. Modes 0, 1, 3 or 4
are used in flux vector control . The difference between these
modes is the method used to identify the motor parameters,
particularly the stator resistance. As these parameters vary
with the temperature and are essential to obtain optimum
performance, the machine cycle should be taken into account
when selecting the most appropriate mode. Modes 2 and 5
correspond to a U/F ratio control mode. This ratio is linear in
mode 2 and square in mode 5.
0 (RS:EACH RUN) (r.run): The stator resistance and voltage
offset are measured each time the drive receives a run
command.
These measurements are only valid if the machine is
stopped, and totally defluxed. The measurement is not taken
when the run command is given less than 2 seconds after the
previous stop. This is the most effective flux vector control
mode. However, the operating cycle must be compatible with
the 2 seconds required between a stop command and a new
run command.
1 (RS:NO Mes.) (r.no): The stator resistance
5.17
and
voltage offset
5.23
are not measured.
This mode is of course the least effective. It should be used
only when mode 0 (r.run) is incompatible with the operating
cycle. If this were the case, during commissioning, an
autotune (
5.12
) should be performed to read the values
measured in
5.17
and
5.23
and these should be used with
mode 1 (r.no) in normal operation.
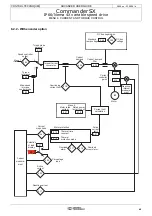
2 (LINEAR V/F) (UtoF): Voltage-frequency ratio with fixed
boost adjustable via parameters
5.15
and
5.09
.
WARNING:
Use this mode to control several motors.
3 (RS:1st RUN) (r.FSt): operation equivalent to setting 1
(RS:NO Mes.) (r.no).
4 (RS:POWER UP) (r.On): operation equivalent to setting 0
(RS:EACH RUN) (r.run) after the first start.
5 (V/F SQUARE) (SqrE): Square law characteristic.
• In mode 4 (r.On), a voltage is briefly applied to the
motor. For safety, no electrical circuit must be
accessible once the drive has been powered up.
5.12
5.13
5.14
Motor voltage
Boost
Motor frequency
5.09
/2
5.09
5.06
/2
5.06
5.15
Motor voltage
Boost
Motor frequency
5.09
5.06
5.15







































































