



























23
ADVANCED USER GUIDE
IP66/Nema 4X variable speed drive
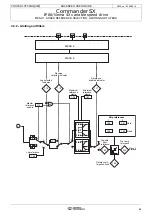
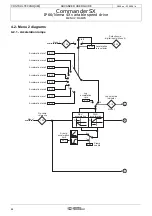
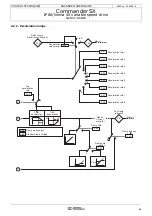
MENU 1: SPEED REFERENCE: SELECTION, LIMITING AND FILTERS
CONTROL TECHNIQUES
3854 en - 03.2008 / b
Notes
The Emerson Commander SX is a cutting-edge device that enhances your user experience with its advanced features. Unlock the device's full potential with the free Advanced User's Manual available for download at manualshive.com. This comprehensive manual ensures you make the most of your Commander SX's capabilities.
23
ADVANCED USER GUIDE
IP66/Nema 4X variable speed drive
MENU 1: SPEED REFERENCE: SELECTION, LIMITING AND FILTERS
CONTROL TECHNIQUES
3854 en - 03.2008 / b
Notes







































































