





























ASDA-A User Manual
Chapter 7 Parameters
© DELTA ELECTRONICS, INC. ALL RIGHTS RESERVED
4th Edition 2005/11/30,
HE03
7-37
P1 - 47
HMOV
Homing Mode
Communication Addr.: 012FH
Default: 00
Applicable Control Mode: P
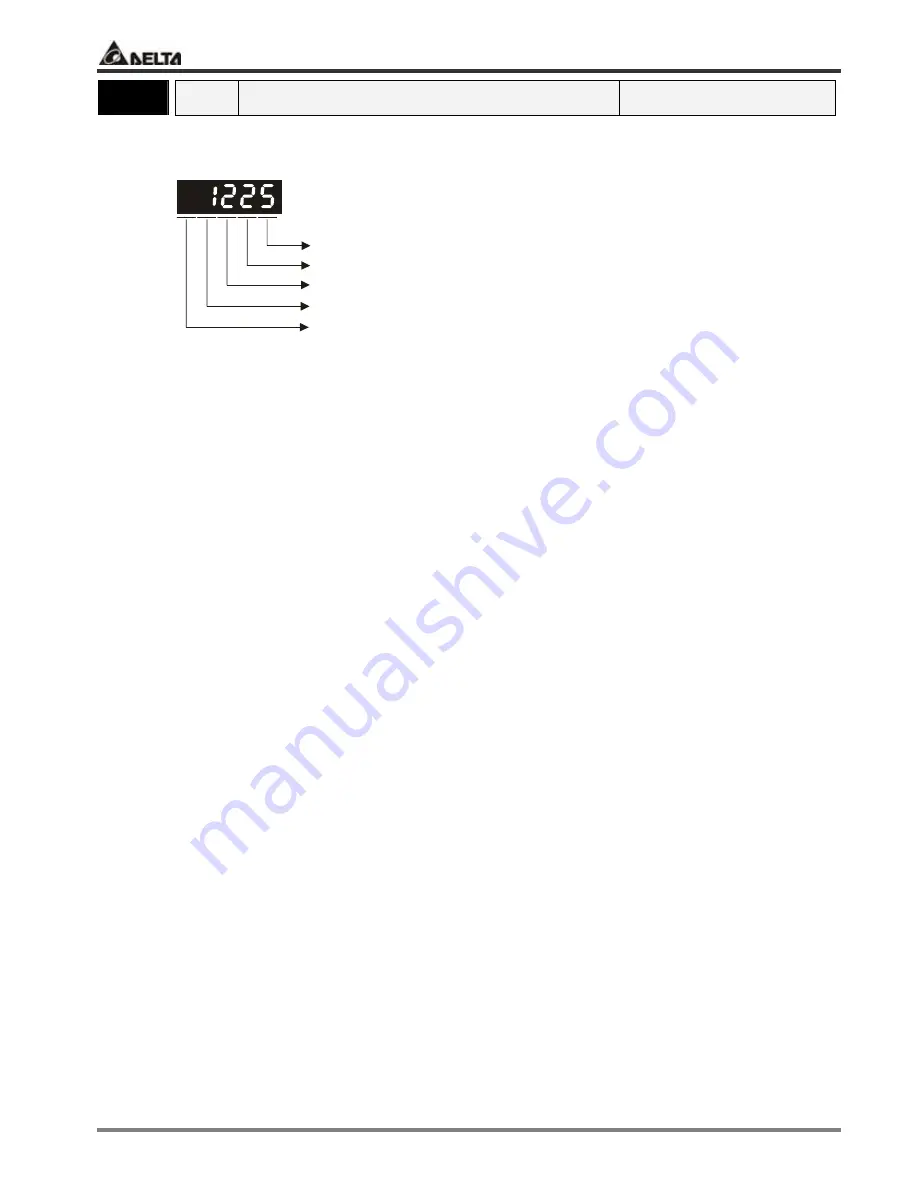
Range: 00~1225
not used
A
B
C
D
D=0: After detecting “Home”, the motor will decelerate and return to “Home”.
D=1: After detecting “Home”, the motor will decelerate and stop in the forward direction.
C=0: Disable homing function.
C=1: Enable homing function automatically after power supplies to the servo drive.
C=2: Enable homing function by SHOM.
B=0: Return to find Z-phase pulse during homing
B=1: Do not return and go forward to find Z-phase pulse during homing
B=2: Positioning at home sensor position or Z-phase pulse during homing (it only can be used
when A=2, 3, 4 or 5)
Other: Reserved
A=0: Forward homing (CCWL as “Home”)
A=1: Reverse homing (CWL as “Home”)
A=2: Forward homing (ORGP as “Home”)
A=3: Reverse homing (ORGP as “Home”)
A=4: Forward to find Z-phase pulse and regard Z-phase pulse as “Home”
A=5: Reverse to find Z-phase pulse and regard Z-phase pulse as “Home”
Setting example:
Power supplies to the servo drive, after servo on, immediately perform the homing function and
use CCWL as “Home”.
1: Refer to P1-01 for forward and reverse direction
2: CWL and CCWL (refer to Table 7.A) should be assigned into internal input contact (refer to
P2-10~P2-17) and connected to external limit switch corresponding to internal contact.
3: Set the value of P1-47 to 100.
4: Restart power on again, after servo on, the drive will immediately perform homing function
automatically according to the assigned direction.
Note: When using CWL and CCWL as “Home”, these two inputs will return to limit stop protect
function after homing function is completed. It is recommended to set CWL and CCWL at the
terminal of equipment to avoid these two inputs may be triggered during normal operation.





















































