





























20 Gear Drive, Plymouth Ind. Park, Terryville, CT 06786
Tel: (860) 585-1254 Fax: (860) 584-1973 http://www.amci.com
SV160E2 User Manual
SV160E2 S
PECIFICATIONS
15
Servo Control
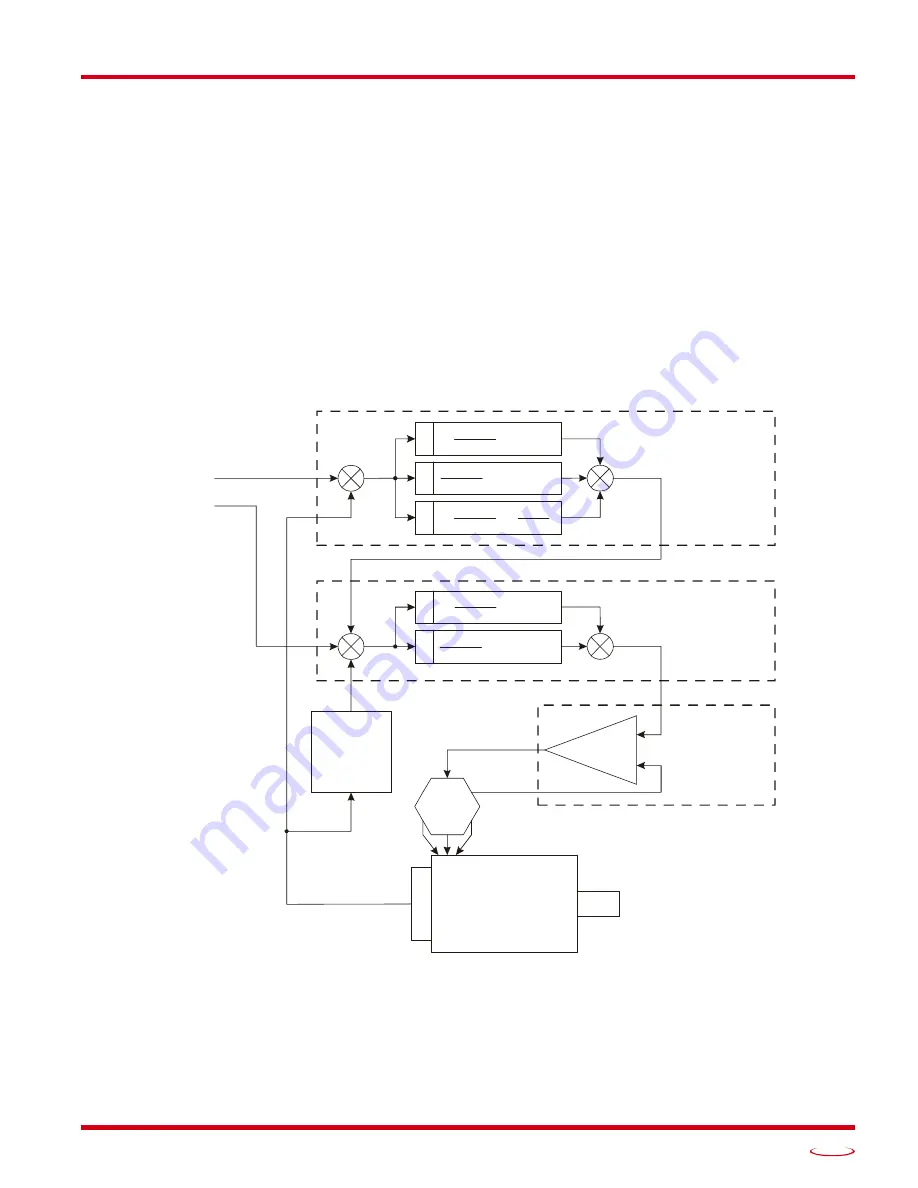
The SV160E2 uses three control loops to control the position and velocity of the motor. The inner most loop
is the current loop. The optimum PID values for the current loop are solely dependant on motor characteris-
tics. These values are set at the factory during the final test of the SV160E2 and are stored in the device’s
flash memory. In order to simplify programming, these current loop values are not available to the end user
since they are optimized at the factory.
The next inner loop is the velocity loop. This is implemented as a PI loop that includes a programmable low
pass filter on the velocity feedback. This filter is used to reduce high frequency stability issues that may exist
in some applications.
The outer most loop is the position loop. This is a full PID loop that generates the velocity setpoint for the
velocity PI loop.
The position setpoint, SP
POS
in the figure below, is generated and updated by the SV160E2 through the
motion profile generator. The velocity feed forward value, FF
VEL
in the figure below, is also generated by the
motion profile generator.
Figure R1.2 Cascade PID Loop Control
The P, I, and D variables of the position loop, as well as the P and I variables of the velocity loop, can be
directly programmed as part of the configuration data. This gives the end user the ability to fine tune parame-
ters in applications that require the highest performance levels. This can also complicate system startup. To
simplify the startup procedure as much as possible, starting values for these variables are published later in
this manual for load inertia values from one to twenty times the motor inertia value.
–
–
+
+
+
+
+
+
+
+
=
=
=
=
Velocity
Calculation
with
Programmable
Low Pass Filter
Current
PID Loop
Motor
Power
Stage
BLDC
Motor
ABS
E
nc
ode
r
Position Feedback
Current
Feedback
Velocity Feedback
KP_VEL
512
+
–
X
KP_POS
32,768
X
KD_POS
32,768
dt
E
POS
(t)
X
KI_VEL
4,096
E d
VEL
X
∫
0
0
KI_POS
262,144
E d
POS
X
∫
I
I
D
P
Velocity
PI Loop
Factory
Set
Current
PID Loop
Position
PID Loop
P
SP
POS
FF
VEL
SP
VEL
SP
CUR
E
VEL
E
VEL
E
POS
E
POS
Summary of Contents for SV160E2
Page 1: ...MICRO CONTROLS INC ADVANCED U s e r M anual Manual 940 0S252 E2 Technology...
Page 10: ...ABOUT THIS MANUAL SV160E2 User Manual ADVANCED MICRO CONTROLS INC 10 Notes...
Page 40: ...MOVE PROFILE CALCULATIONS SV160E2 User Manual ADVANCED MICRO CONTROLS INC 40 Notes...
Page 56: ...CONFIGURATION MODE DATA FORMAT SV160E2 User Manual ADVANCED MICRO CONTROLS INC 56 Notes...
Page 88: ...INSTALLING THE SV160E2 SV160E2 User Manual ADVANCED MICRO CONTROLS INC 88 Notes...
Page 108: ...ETHERNET IP EXPLICIT MESSAGING SV160E2 User Manual ADVANCED MICRO CONTROLS INC 108 Notes...
Page 112: ...MODBUS TCP CONFIGURATION SV160E2 User Manual ADVANCED MICRO CONTROLS INC 112 Notes...
Page 120: ...LEADERS IN ADVANCED CONTROL PRODUCTS ADVANCED MICRO CONTROLS INC...