





























Standard programposi features 61
Autotune modes
Autotuning can be performed in three different ways depending on the setting of
parameter
Speed controller autotune mode
. The selections
,
define how the drive torque reference should react to a speed reference
step after tuning. The selection
will produce a slow but robust response;
will produce a fast response but possibly too high gain values for some
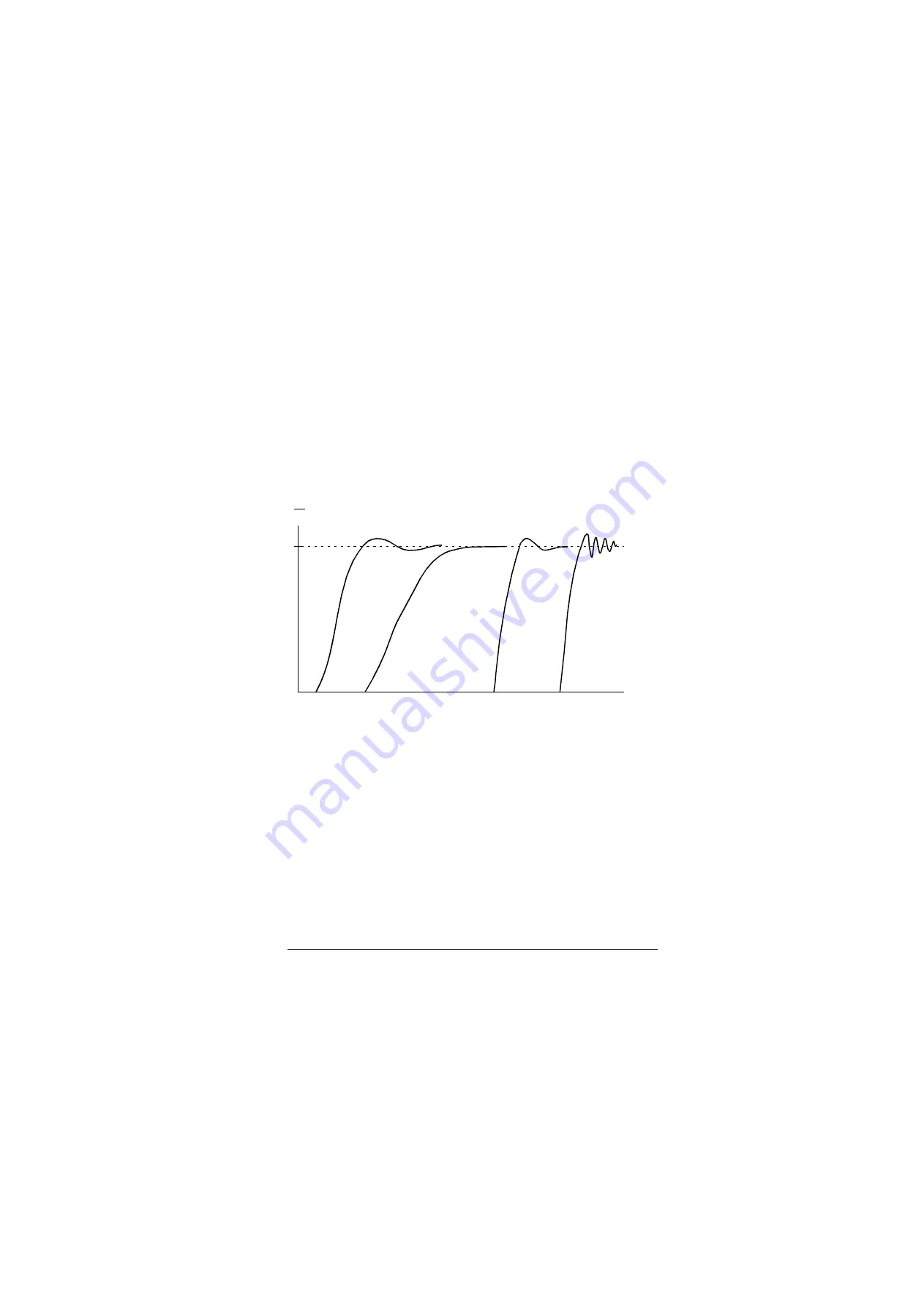
applications. The figure below shows speed responses at a speed reference step
(typically 1…20%).
Autotune results
At the end of a successful autotune routine, its results are automatically transferred
into parameters
•
(proportional gain of the speed controller)
•
(integration time of the speed controller)
•
(mechanical time constant of the motor and
machine).
Nevertheless, it is still possible to manually adjust the controller gain, integration time
and derivation time.
A: Undercompensated
B: Normally tuned (autotuning)
C: Normally tuned (manually). Better dynamic performance than with B
D: Overcompensated speed controller
%
t
n
C
B
D
n
N
A
Summary of Contents for ACS880 ESP
Page 1: ...ABB industrial drives Firmware manual ACS880 PCP ESP control program ...
Page 4: ......
Page 28: ...28 PCP ESP control start up ...
Page 30: ...30 Using the control panel ...
Page 94: ...94 Standard programposi features ...
Page 100: ...100 Default control connections ...
Page 360: ...360 Parameters ...
Page 436: ...436 Fault tracing ...
Page 486: ...486 Control chain diagrams ...
Page 492: ...492 Appendix ESP with step up transformer and sine filter ...
Page 494: ...Contact us www abb com drives www abb com drivespartners 3AXD50000016186 Rev B EN 2015 10 27 ...







































































