





























62 Standard programposi features
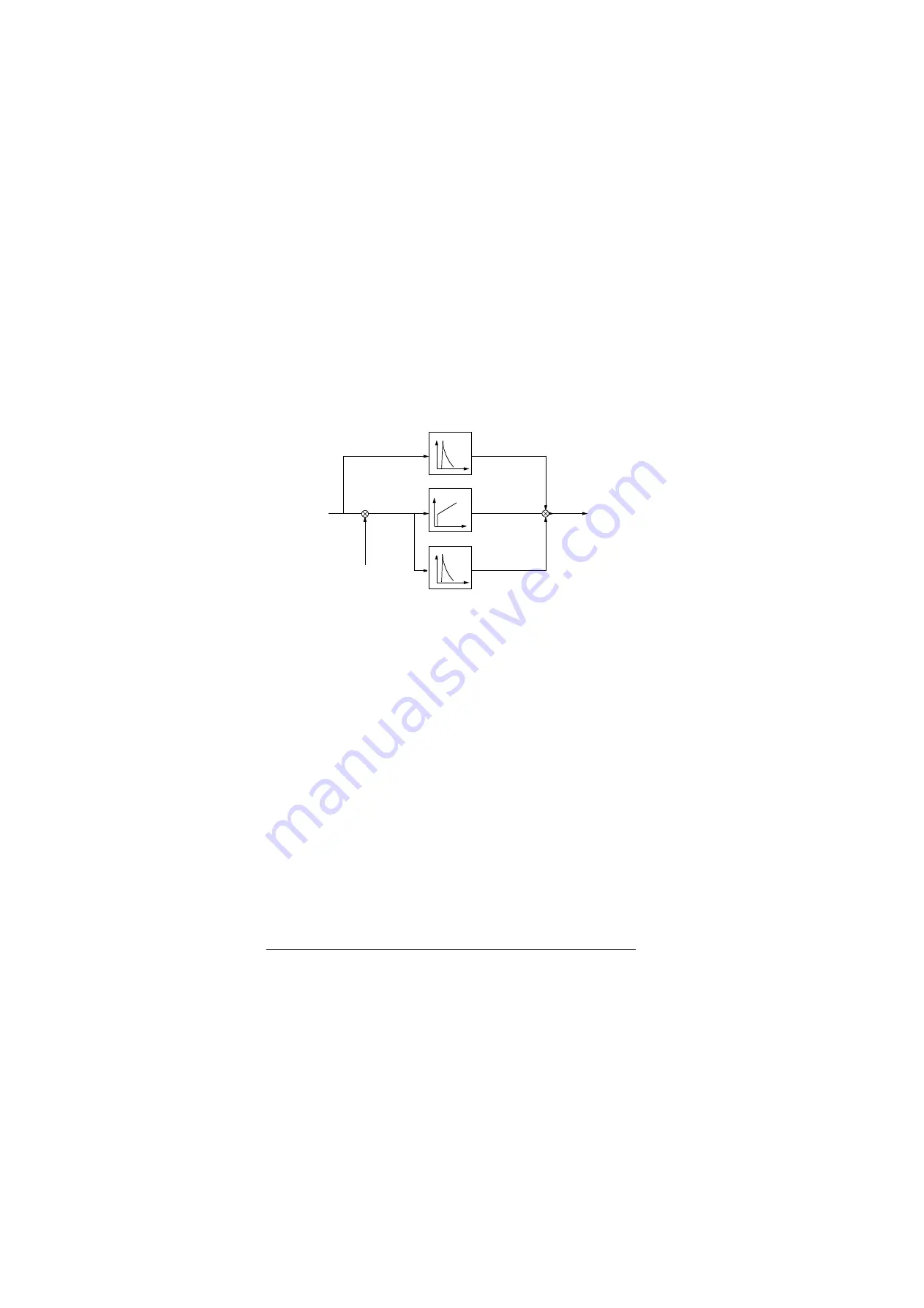
The figure below is a simplified block diagram of the speed controller. The controller
output is the reference for the torque controller.
Warning indications
A warning message,
, will be generated if the
autotune routine does not complete successfully. See chapter
(page
) for further information.
Settings
Parameters
(page
).
Oscillation damping
The oscillation damping function can be used to cancel out oscillations caused by
mechanics or an oscillating DC voltage. The input – a signal reflecting the oscillation
– is selected by parameter
Oscillation compensation input
. The oscillation
damping function outputs a sine wave (
) which can
be summed with the torque reference with a suitable gain (
) and phase shift (
).
The oscillation damping algorithm can be activated without connecting the output to
the reference chain, which makes it possible to compare the input and output of the
function and make further adjustments before applying the result.
Rush control
In torque control, the motor could potentially rush if the load were suddenly lost. The
control program has a rush control function that decreases the torque reference
whenever the motor speed exceeds
Derivative
Proportional,
integral
Derivative
acceleration
compensation
Torque
reference
Speed
reference
Actual speed
Error
value
-
+
+
+
+
Summary of Contents for ACS880 ESP
Page 1: ...ABB industrial drives Firmware manual ACS880 PCP ESP control program ...
Page 4: ......
Page 28: ...28 PCP ESP control start up ...
Page 30: ...30 Using the control panel ...
Page 94: ...94 Standard programposi features ...
Page 100: ...100 Default control connections ...
Page 360: ...360 Parameters ...
Page 436: ...436 Fault tracing ...
Page 486: ...486 Control chain diagrams ...
Page 492: ...492 Appendix ESP with step up transformer and sine filter ...
Page 494: ...Contact us www abb com drives www abb com drivespartners 3AXD50000016186 Rev B EN 2015 10 27 ...







































































