





























150 Parameters
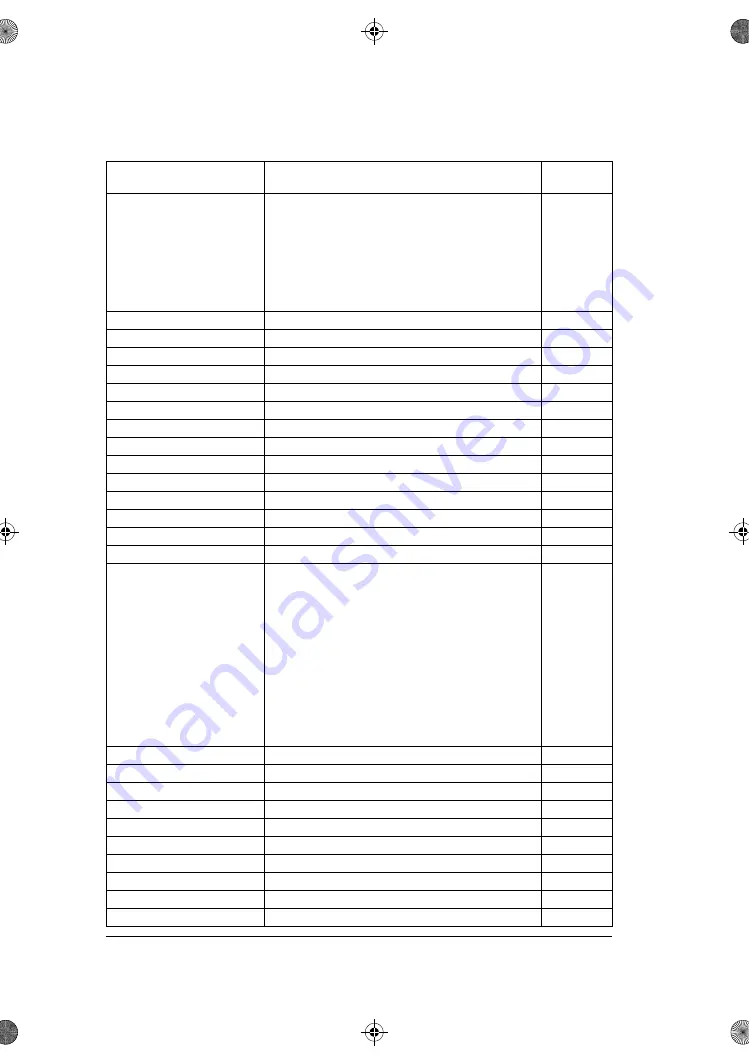
Setting this parameter to 0 stops motor rotating but does
not affect any other conditions for rotating. Setting the
parameter back to 1 starts motor rotating again.
This parameter can be used for example with a signal
from some external equipment to prevent the motor
rotating before the equipment is ready.
When this parameter is 0 (rotating of the motor is
disabled), bit 13 of parameter
is set to 0.
Not selected
0 (always off).
0
Selected
1 (always on).
1
DI1
Digital input DI1 (
, bit 0).
2
DI2
Digital input DI2 (
, bit 1).
3
DI3
Digital input DI3 (
, bit 2).
4
DI4
Digital input DI4 (
, bit 3).
5
DI5
Digital input DI5 (
, bit 4).
6
Supervision 1
Bit 0 of
24
Supervision 2
Bit 1 of
25
Supervision 3
Bit 2 of
26
Supervision 4
Bit 3 of
27
Supervision 5
Bit 4 of
28
Supervision 6
Bit 5 of
29
-
Selects the source for a jog enable signal.
(The sources for jogging activation signals are selected by
parameters
1 = Jogging is enabled.
0 = Jogging is disabled.
Notes:
• Jogging is supported in vector control mode only.
• Jogging can be enabled only when no start command
from an external control location is active. On the other
hand, if jogging is already enabled, the drive cannot be
started from an external control location (apart from
inching commands through fieldbus).
See section
on page
.
Not selected
0.
0
Selected
1.
1
DI1
Digital input DI1 (
, bit 0).
2
DI2
Digital input DI2 (
, bit 1).
3
DI3
Digital input DI3 (
, bit 2).
4
DI4
Digital input DI4 (
, bit 3).
5
DI5
Digital input DI5 (
, bit 4).
6
Supervision 1
Bit 0 of
24
Supervision 2
Bit 1 of
25
Supervision 3
Bit 2 of
26
No.
Name/Value
Description
Default
FbEq 16
ACS180 FW.book Page 150 Tuesday, March 9, 2021 2:25 PM