





























02.2004
Communication / USS
Siemens AG
6SE7087-6QX70 (Version AD)
SIMOVERT MASTERDRIVES
Compendium Motion Control
8.1-7
8.1.1.2 Bus
structure
The data transfer medium and the physical bus interface are essentially
determined by what the bus system is used for.
The physical interface of the USS protocol is based on the
"Recommended Standard RS-485". For point-to-point links, a sub-
quantity of EIA RS-232 (CCITT V.24), TTY (20 mA current loop) or
fiber-optic cables can be used as the physical interface.
The interfaces for SIMOVERT MASTERDRIVES are always RS 485
with 2-wire cable.
Exception:
Either RS 485 or RS 232 can be connected at the 9-pin
SUB D socket connector on the PMU (operator control
and parameterizing unit) of the basic units.
This section describes how a USS field bus has to be structured in
order to ensure reliable data transfer via the transfer medium in
standard applications. Under special conditions of use, additional
factors must be taken into account which require further measures or
restrictions that are not described in this document.
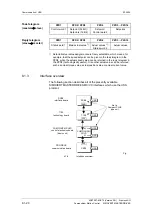
The USS bus is based on a linear topology without branches.
Both ends of the line terminate at a node.
The maximum cable length and therefore the maximum distance
between the master and the last slave is limited by the characteristics
of the cable, the ambient conditions and the data transfer rate. With a
data transfer rate of < 100 kbit/s, a maximum length of 1200 m is
possible.
The number of nodes is limited to a maximum of 33
(1 master, 32 slaves).
MASTER
SLAVE
SLAVE
Maximum 32 slaves
Last node
First node
SLAVE
Fig. 8.1-7
USS bus topology
NOTICE
Topology
Содержание simovert masterdrives
Страница 1: ...Compendium Edition AN simovert masterdrives Motion Control ...
Страница 2: ......
Страница 13: ......
Страница 197: ...Parameterizing Steps 08 2012 6SE7087 6QX70 Version AN Siemens AG 6 32 Compendium Motion Control SIMOVERT MASTERDRIVES ...
Страница 199: ...Parameterizing Steps 08 2012 6SE7087 6QX70 Version AN Siemens AG 6 34 Compendium Motion Control SIMOVERT MASTERDRIVES ...
Страница 201: ...Parameterizing Steps 08 2012 6SE7087 6QX70 Version AN Siemens AG 6 36 Compendium Motion Control SIMOVERT MASTERDRIVES ...
Страница 203: ...Parameterizing Steps 08 2012 6SE7087 6QX70 Version AN Siemens AG 6 38 Compendium Motion Control SIMOVERT MASTERDRIVES ...
Страница 205: ...Parameterizing Steps 08 2012 6SE7087 6QX70 Version AN Siemens AG 6 40 Compendium Motion Control SIMOVERT MASTERDRIVES ...
Страница 207: ...Parameterizing Steps 08 2012 6SE7087 6QX70 Version AN Siemens AG 6 42 Compendium Motion Control SIMOVERT MASTERDRIVES ...
Страница 209: ...Parameterizing Steps 08 2012 6SE7087 6QX70 Version AN Siemens AG 6 44 Compendium Motion Control SIMOVERT MASTERDRIVES ...
Страница 947: ...08 2012 Siemens AG 6SE7087 6QX70 Version AN SIMOVERT MASTERDRIVES Compendium Motion Control Function Diagrams ...
Страница 1160: ...03 2010 Siemens AG 6SE7087 6QX70 Version AL SIMOVERT MASTERDRIVES Compendium Motion Control General parameter list ...
Страница 1416: ...03 2010 Siemens AG 6SE7087 6QX70 Version AL SIMOVERT MASTERDRIVES Compendium Motion Control Connector list ...
Страница 1446: ...03 2010 Siemens AG 6SE7087 6QX70 Version AL SIMOVERT MASTERDRIVES Compendium Motion Control Binector list ...
Страница 1466: ...03 2010 Siemens AG 6SE7087 6QX70 Version AL SIMOVERT MASTERDRIVES Compendium Motion Control List of function data set parameters ...
Страница 1471: ...03 2010 Siemens AG 6SE7087 6QX70 Version AL SIMOVERT MASTERDRIVES Compendium Motion Control List of binector data set parameters ...
Страница 1535: ......
Страница 1536: ......
Страница 1537: ......
Страница 1538: ......
Страница 1539: ......
Страница 1540: ......
Страница 1541: ......
Страница 1542: ......
Страница 1543: ......
Страница 1546: ......





















































