




























KFU-
tronic
13
3.2
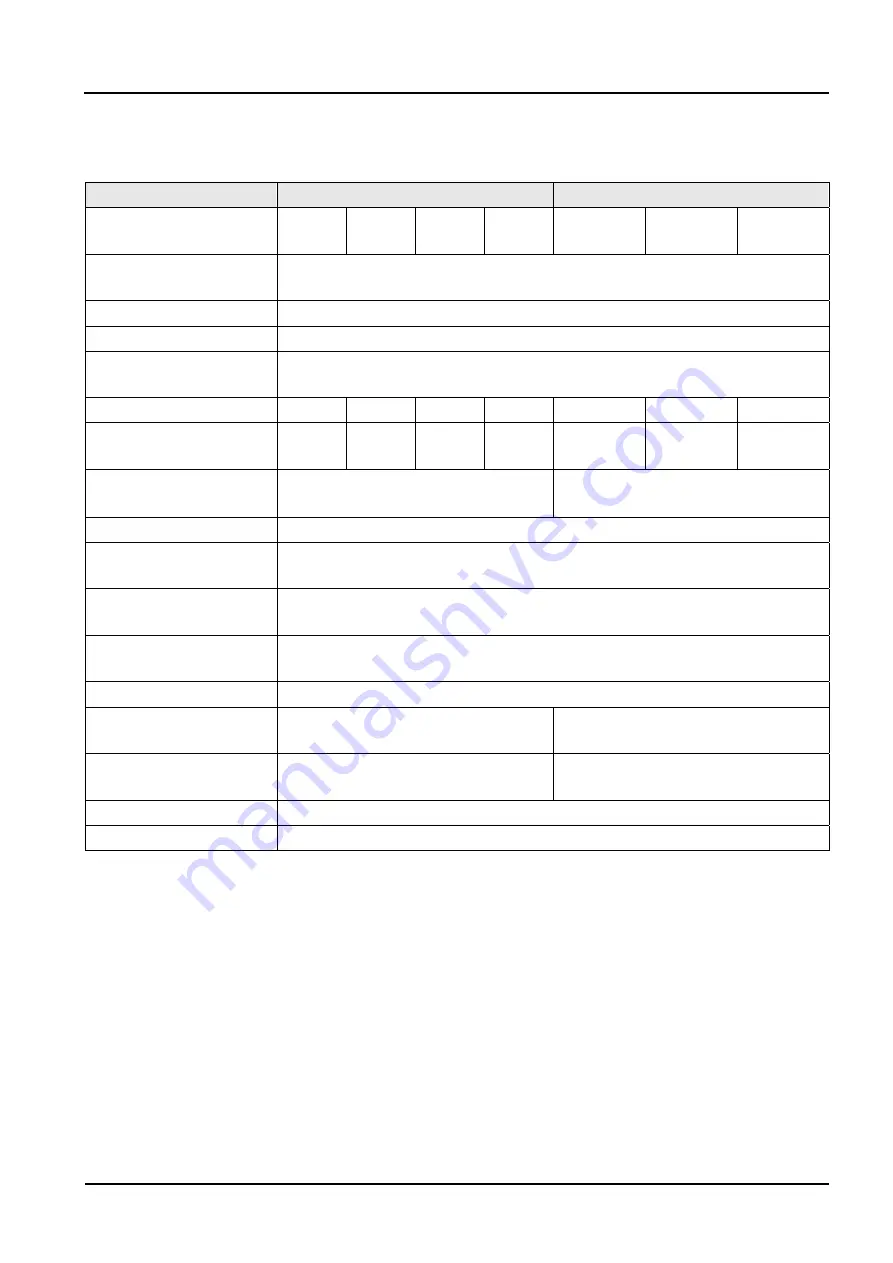
General data
Installations size
A
B
Rated motor power
[kW] / 4-pole motor
0,55 0,75 1,1 1,5
2,2
3,0
4,0
Ambient temperature
[°C]
-25 (non condensing) to +50 (without derating) *
Mains voltage [V]
3~ 200 -10% … 480 +10%
Mains frequency [Hz]
47 to 63
Network configura-
tions
TN/TT
Mains current [A]
1,4
1,9
2,6
3,3
4,6
6,2
7,9
rated current, eff.
[I
N
at 8 kHz/400 V]
1,7 2,3 3,1 4,0 5,6
7,5
9,5
Min. brake resistance
[
]
100 50
Max. current eff
150 % of th rated current for 60 sec
Switching frequency
[kHz]
4, 8, 16, (factory setting 8)
Rotating field
frequency [Hz]
0 - 400
Protective functions
Undervoltage, Overvoltage, I
2
t restriction, short circuit,
motor –inverter temperature, anti-tilt protection, stall protection
Process control
PID controller, free configuration
Dimensions
[L x W x H in mm]
233 x 153 x 120
270 x 189 x 133
Weight incl. adapter
plate [kg]
3,9 5,0
Protection type
IP65
EMV
approvals acc. to DIN EN 61800-3, class C2
* in terms of the UL 508C standard, please see chapter 9.4!
(technical changes reserved)
Содержание KFUtronic Series
Страница 5: ...KFU tronic 4 ...
Страница 31: ...KFU tronic 30 5 3 Block diagram General structure of target value generation ...







































































