





























5-272
L90 LINE CURRENT DIFFERENTIAL SYSTEM – INSTRUCTION MANUAL
GROUPED ELEMENTS
CHAPTER 5: SETTINGS
5
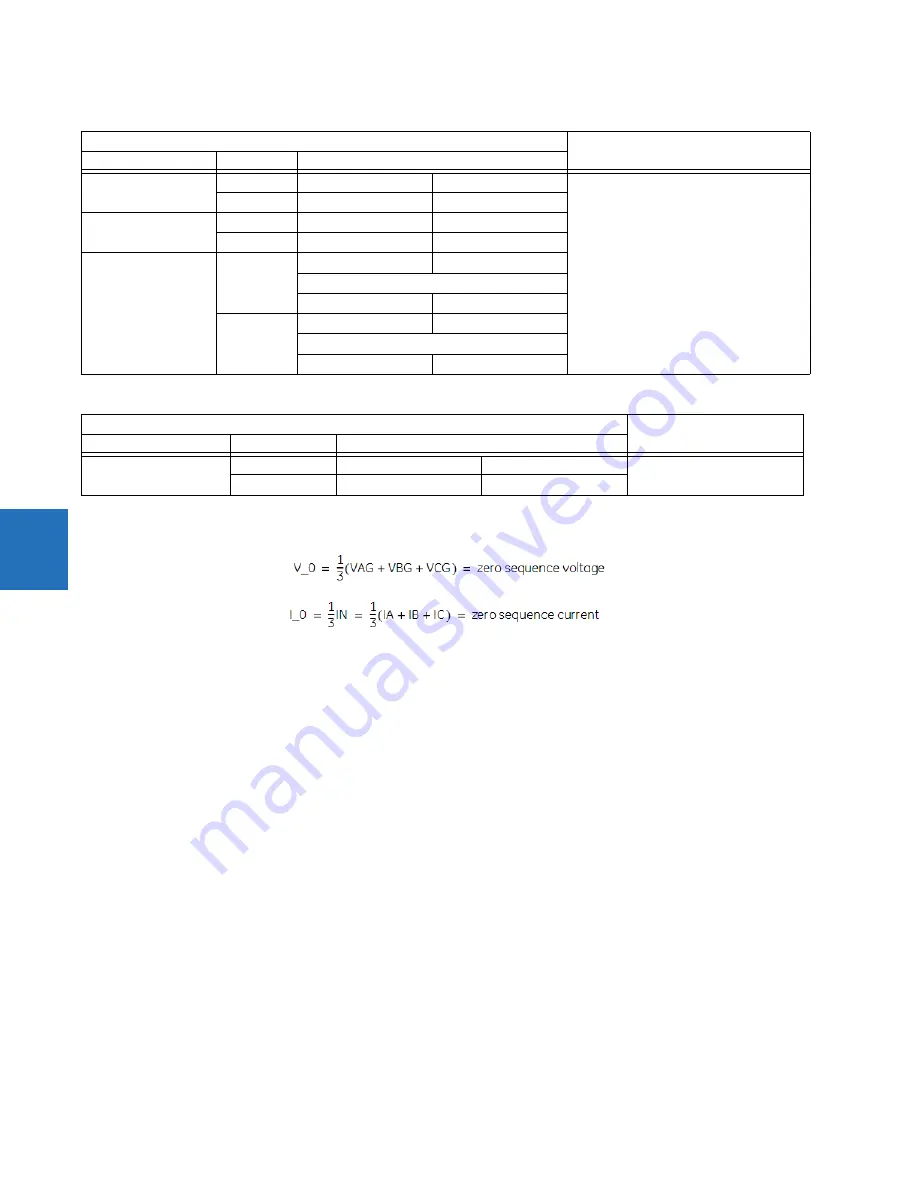
Table 5-37: Quantities for "calculated 3I0" configuration
Table 5-38: Quantities for "measured IG" configuration
where:
ECA = element characteristic angle
IG = ground current
Z_offset is the offset impedance, for which magnitude is the OFFSET setting and angle is the FWD ECA
When
NEUTRAL DIR OC1 POL VOLT
is set to “Measured VX,” one-third of this voltage is used in place of V_0. The following
figure explains the usage of the voltage polarized directional unit of the element.
The figure shows the voltage-polarized phase angle comparator characteristics for a phase A to ground fault, with:
•
ECA = 90° (element characteristic angle = centerline of operating characteristic)
•
FWD LA = 80° (forward limit angle = the ± angular limit with the ECA for operation)
•
REV LA = 80° (reverse limit angle = the ± angular limit with the ECA for operation)
The element incorporates a current reversal logic. If the reverse direction is indicated for at least 1.25 of a power system
cycle, the prospective forward indication is delayed by 1.5 of a power system cycle. The element is designed to emulate an
electromechanical directional device. Larger operating and polarizing signals results in faster directional discrimination
bringing more security to the element operation.
The forward-looking function is designed to be more secure as compared to the reverse-looking function, and therefore is
to be used for the tripping direction. The reverse-looking function is designed to be faster as compared to the forward-
looking function and is to be used for the blocking direction. This allows for better protection coordination.
Take the bias into account when using the neutral directional overcurrent element to directionalize other protection
elements.
Directional unit
Overcurrent unit
Polarizing mode
Direction
Compared phasors
Voltage
Forward
–V_0 + Z_offset
×
I_0
I_0
×
1
∠
ECA
I
op
= 3
×
(|I_0| – K
×
|I_1|) if |I
1
| > 0.8 pu
I
op
= 3
×
(|I_0|) if |I
1
|
≤
0.8 pu
Reverse
–V_0 + Z_offset
×
I_0
–I_0
×
1
∠
ECA
Current
Forward
IG
I_0
Reverse
IG
–I_0
Dual, Dual-V, Dual-I
Forward
–V_0 + Z_offset
×
I_0
I_0
×
1
∠
ECA
or
IG
I_0
Reverse
–V_0 + Z_offset
×
I_0
–I_0
×
1
∠
ECA
or
IG
–I_0
Directional unit
Overcurrent unit
Polarizing mode
Direction
Compared phasors
Voltage
Forward
–V_0 + Z_offset
×
IG/3
IG
×
1
∠
ECA
I
op
= |IG|
Reverse
–V_0 + Z_offset
×
IG/3
–IG
×
1
∠
ECA
Содержание L90
Страница 14: ...1 4 L90 LINE CURRENT DIFFERENTIAL SYSTEM INSTRUCTION MANUAL FOR FURTHER ASSISTANCE CHAPTER 1 INTRODUCTION 1 ...
Страница 68: ...2 54 L90 LINE CURRENT DIFFERENTIAL SYSTEM INSTRUCTION MANUAL SPECIFICATIONS CHAPTER 2 PRODUCT DESCRIPTION 2 ...
Страница 136: ...3 68 L90 LINE CURRENT DIFFERENTIAL SYSTEM INSTRUCTION MANUAL CONNECT TO D400 GATEWAY CHAPTER 3 INSTALLATION 3 ...
Страница 224: ...4 88 L90 LINE CURRENT DIFFERENTIAL SYSTEM INSTRUCTION MANUAL FLEXLOGIC DESIGN USING ENGINEER CHAPTER 4 INTERFACES 4 ...
Страница 692: ...6 36 L90 LINE CURRENT DIFFERENTIAL SYSTEM INSTRUCTION MANUAL PRODUCT INFORMATION CHAPTER 6 ACTUAL VALUES 6 ...
Страница 708: ...7 16 L90 LINE CURRENT DIFFERENTIAL SYSTEM INSTRUCTION MANUAL TARGETS MENU CHAPTER 7 COMMANDS AND TARGETS 7 ...
Страница 742: ...9 6 L90 LINE CURRENT DIFFERENTIAL SYSTEM INSTRUCTION MANUAL TESTING CHAPTER 9 COMMISSIONING 9 ...
Страница 804: ...10 62 L90 LINE CURRENT DIFFERENTIAL SYSTEM INSTRUCTION MANUAL FAULT LOCATOR CHAPTER 10 THEORY OF OPERATION 10 ...
Страница 872: ...C 6 L90 LINE CURRENT DIFFERENTIAL SYSTEM INSTRUCTION MANUAL COMMAND LINE INTERFACE APPENDIX C COMMAND LINE INTERFACE C ...
Страница 878: ...D 6 L90 LINE CURRENT DIFFERENTIAL SYSTEM INSTRUCTION MANUAL REVISION HISTORY APPENDIX D MISCELLANEOUS D ...
Страница 882: ...iv L90 LINE CURRENT DIFFERENTIAL SYSTEM INSTRUCTION MANUAL ABBREVIATIONS ...
Страница 900: ...xviii L90 LINE CURRENT DIFFERENTIAL SYSTEM INSTRUCTION MANUAL INDEX ...







































































