





























C H A N GE PARA METERS
1 1 9
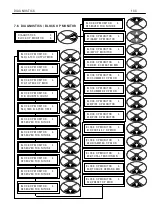
T ype 1
i
s the preferred marker s
i
gna
l
. Th
i
s
i
s because for most of the t
i
me the s
i
gna
l
i
s w e
ll
a w ay from the
l
og
i
c thresho
l
d and no
i
se
i
s very un
li
ke
l
y to cause a fa
l
se marker read
i
ng.
T ypes 2 and 3 ho w ever spend s
i
gn
i
f
i
cant t
i
me near the
l
og
i
c thresho
l
d
l
eve
l
, and therefore no
i
se
i
s more
li
ke
l
y to produce a fa
l
se marker read
i
ng.
6.1 0.9. 4 SPINDLE ORIEN T A TE / M arker offset PIN 2 4 1
Note. Th
i
s offset
i
s on
l
y added once at the commencement of or
i
entat
i
on. It may be changed pr
i
or to the
next or
i
entat
i
on sequence w
i
thout affect
i
ng the ex
i
st
i
ng pos
i
t
i
on. The s
i
gn of the offset determ
i
nes the
rotat
i
on d
i
rect
i
on w hen seek
i
ng the offset.
The count va
l
ue needed for any offset ang
l
e depends on the reso
l
ut
i
on of the feedback encoder and the type
of encoder output. Q uadrature encoders prov
i
de 4 counts per
li
ne. S
i
ng
l
e pu
l
se and d
i
rect
i
on encoders
prov
i
de 2 counts per
li
ne.
E.g. Encoder has 3 6 0 0
li
nes. Encoder type
i
s Q U A DRA T URE.
Th
i
s g
i
ves 3 6 0 0 X 4 counts per rev = 1 4 4 0 0. That
i
s 1 4 4 0 0/3 6 0 = 4 0 counts per degree of d
i
sp
l
acement.
Hence
i
f offset requ
i
red
i
s 5 6.8 degrees. Then enter counts of 5 6.8 X 4 0 = 2 2 7 2.
E.g. Encoder has 2 0 4 8
li
nes. Encoder type
i
s SIN GLE LINE PLUS DIRE C TIO N.
Th
i
s g
i
ves 2 0 4 8 X 2 counts per rev = 4 0 9 6. That
i
s 4 0 9 6/3 6 0 = 1 1. 3 7 8 counts per degree of d
i
sp
l
acement.
Hence
i
f offset requ
i
red
i
s 5 6.8 degrees. Then enter counts of 5 6.8 X 1 1.3 7 8 = 6 4 6.
If the encoder
i
s mounted on the motor shaft, but the sp
i
nd
l
e that requ
i
res or
i
entat
i
on
i
s connected to the
motor v
i
a a gearbox such that the motor shaft and hence encoder
i
s rotat
i
ng faster than the sp
i
nd
l
e. Then
the number of counts per rev of the sp
i
nd
l
e w
ill
be
i
ncreased by a factor equa
l
to the gear box rat
i
o.
T ype 3
1 rev
Po
i
nt of pos
i
t
i
on
measurement
Po
i
nt of pos
i
t
i
on
measurement
T ype 2
T ype 1
Log
i
c
Thresho
l
d
Log
i
c
Thresho
l
d
Log
i
c
Thresho
l
d
SPINDLE ORIEN T A TE 4
2 4 1)M ARKER O F FSET
2 4 1)M ARKER O F FSET
0
PAR A ME TER
RA N GE
DEF A ULT
PIN
M ARKER O FFSE T
+ /- 1 5,0 0 0 Counts
0
2 4 1
Used to offset an arb
i
trary
marker to a def
i
ned pos
i
t
i
on.
Содержание PLX
Страница 2: ...2 Contents ...
Страница 202: ......