





























6.7 Troubleshooting Motion Errors
6-31
6
Maintenance and Inspection
6.7.2 Motion Error Details and Corrections
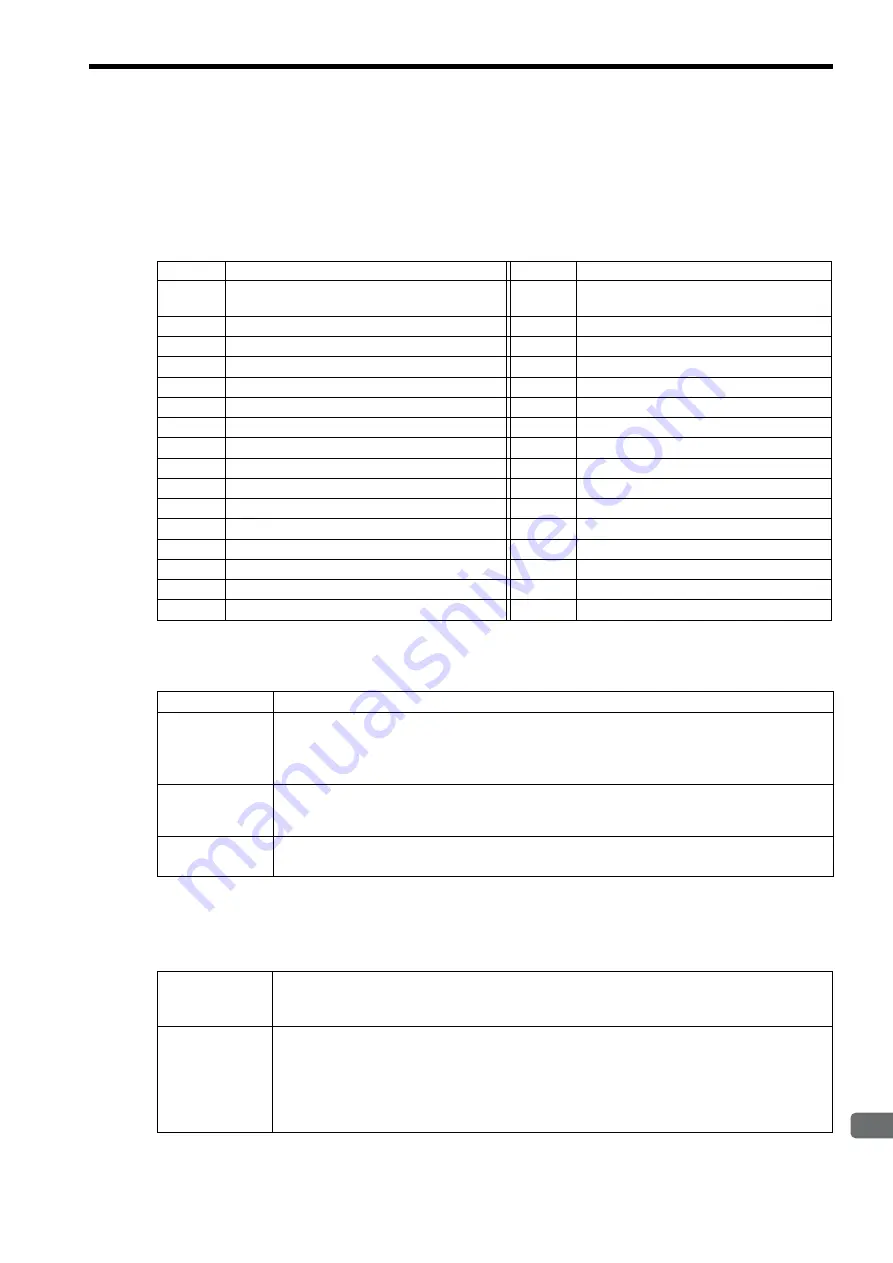
The following tables show the contents of the axis alarms (IL
04) (subsection 1) and axis alarm details
(subsection 2).
( 1 ) Alarm IL
04 List
( 2 ) Bit 0: Servo Driver Error
The above status bit will turn ON for any of the SERVOPACK alarm codes for alarms classified as SERVOPACK
alarms.
( 3 ) Bit 1: Positive Direction Overtravel and Bit 2: Negative Direction Overtravel
IL
04
Alarm Contents
IL
04
Alarm Contents
Bit 0
Servo Driver Error
Bit 10
Servo Driver Synchronization
Communications Error
Bit 1
Positive Direction Overtravel
Bit 11
Servo Driver Communication Error
Bit 2
Negative Direction Overtravel
Bit 12
Servo Driver Command Timeout Error
Bit 3
Positive Direction Software Limit
Bit 13
Excessive ABS Encoder Rotations
Bit 4
Negative Direction Software Limit
Bit 14
Reserved by the system.
Bit 5
Servo OFF
Bit 15
Reserved by the system.
Bit 6
Positioning Time Over
Bit 16
Not used
Bit 7
Excessive Positioning Moving Amount
Bit 17
Not used
Bit 8
Excessive Speed
Bit 18
Not used
Bit 9
Excessive Deviation
Bit 19
Not used
Bit A
Filter Type Change Error
Bit 1A
Not used
Bit B
Filter Time Constant Change Error
Bit 1B
Not used
Bit C
Not used
Bit 1C
Not used
Bit D
Zero Point Unsetting
Bit 1D
Not used
Bit E
Not used
Bit 1E
Motor Type Set Error
Bit F
Not used
Bit 1F
Connected Encoder Type Error
Detection Timing
• SERVOPACK alarms are continuously monitored by the alarm management section.
Processing when
Alarm Occurs
• The current command will be aborted.
If a SERVOPACK error is detected during execution of a POSING command, the positioning will be
aborted and the axis will decelerate to a stop.
• The Command Error Completed Status in the Motion Command Status (IW
09,bit 3) will turn ON.
Error and Cause
• The cause of the error depends on the type of alarm. The contents of an alarm is monitored in IW
2D.
Refer to the list of SERVOPACK alarms in
6.7.3 Servo Driver Status and Servo Driver Error Codes
on
page 6-36 for details.
Correction
• Confirm the SERVOPACK alarm and remove the cause.
• Reset the alarm.
Detection Timing
• Overtravel is continuously monitored by the position management section during execution of a motion
command.
• Overtravel is detected when the overtravel signal in the direction of movement turns OFF.
Processing when
Alarm Occurs
• The SERVOPACK performs stop processing.
The stop method and processing after stopping depends on the SERVOPACK parameter settings.
• The Command Error Completed Status in the Motion Command Status (IW
09, bit 3) will turn ON.
• Machine Controller Processing
The command is canceled and the axis decelerates to a stop. Follow-up processing (each scan the current
position of the machine is adjusted to the reference position) is executed.







































































