





























SD500 Spindle Servo Drive Manual
83
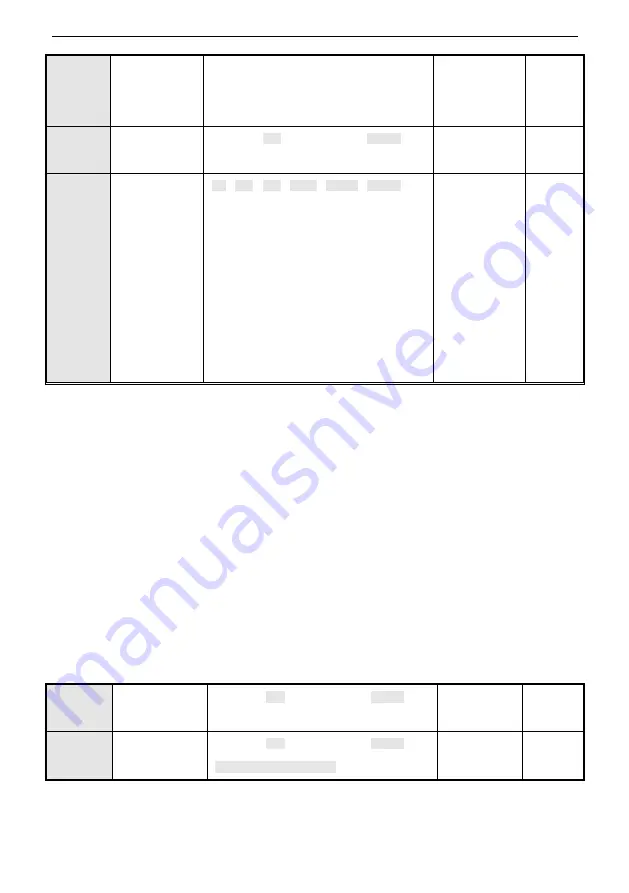
(0x0228)
position
V/F SVC FVC PMVF PMSVC PMFVC
0: single motor encoder 1: single spindle encoder 2: dual
encoder
(0~2)
F02.43
(0x022B)
Position encoder
cable No.
V/F SVC FVC PMVF PMSVC PMFVC
Sets the number of ABZ encoder cables.
1024
(1~10000)
STOP
F02.07
(0x0207)
Self-tuning of motor
parameters
V/F SVC FVC PMVF PMSVC PMFVC
The value of [F02.07] will be set to "0" automatically upon
completion of the adjustment.
0:no movement
1: stat rotary self-learning
2: stationary self-learning
3: stator resistance self-learning
6: Rotary self-learning
7: inertia self-learning
0
(0~7)
STOP
Table 5-1
Set the parameters above, change F02.07 to 1 for rotary self-learning, and then r-00 is displayed, continue to press SET for 1 second until
r-01 appears and then here goes the self-learning.
Before self-learning, users need to select the relevant parameters according to the encoder installation positions, choose the encoder
installation position by F2.40: single motor encoder, single spindle encoder, double encoder.
5.1.1 Single-motor Encoder Mode (F02.40=0)
When the encoder is built into the motor, the default F2.40=0 parameter is used to set the number of encoder cables and then the
self-learning can be performed directly.
If there is any difference between the actual speed and the set speed after the self-learning test run, it can be corrected by fine-tuning the
parameter F15.28/F15.29.
5.1.2 Single-spindle Encoder Mode (F2.40=1)
When the encoder is not installed in the motor but in the mechanical spindle, set the number of encoder cables and select F2.40=1 for
self-learning.
F02.35
(0x0223)
Encoder ratio
numerator
V/F SVC FVC PMVF PMSVC PMFVC
Set the encoder ratio numerator.
1
(1~32767)
RUN
F02.36
(0x0224)
Encoder ratio
denominator
V/F SVC FVC PMVF PMSVC PMFVC
Set the encoder ratio denominator.
1
(1~32767)
RUN
Table 5-2
After self-learning, the encoder ratio will be automatically set to F02.35 and F02.36. The gain is weakened to prevent severe vibrations







































































