





























70
Range
:
0
~
the motor highest speed
Data size
:
16bit
Display mode
:
Decimal system
Parameter function
:
Setting the highest speed allowed. The given value of system shall not be higher than the set, if the motor running speed is
higher than this value, speeding fault happens.
P1-40
Zero speed signal output
Initail value
Unit
Communication
Address
10
rpm
2128H
Control Mode
:
P S T
Range
:
10
~
100
Data size
:
16bit
Display mode
:
Decimal system
Parameter function
:
More are available at P1-41Parameter function.
P1-41
Rotation signal output value
Initail value
Unit
Communication
Address
10
rpm
2129H
Control Mode
:
P S T
Range
:
10
~
1000
Data size
:
16bit
Display mode
:
Decimal system
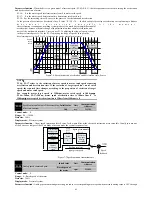
Parameter function
:
When motor stops and the
motor speed is less than P1-40, it argues that
the motor has stopped turning. If the motor speed
is higher than P1-41, it argues that the motor
function
(
Zero speed signal/ZER0+-
);
no.5
in rotating condition. If set any DO terminal no.4
function
(
Motor rotation signal/TGON+-
),
will
output a corresponding signal.
Figure7-11 Zero speed and
rotation signal output value
P1-42
Speed approaches threshold
Initail value
Unit
Communication
Address
100
rpm
212AH
Control Mode
:
P S T
Range
:
10
~
3000
Data size
:
16bit
Display mode
:
Decimal system
Parameter function
:
When |given speed-current speed|
≤
P1-42
,
it‘s closed to the set speed .If any DO terminal is set no.5 function
(
speed
approaches/V-CLS+-
)
, the terminal output effective, as shown in figure7-12.
P1-43
Speed reaches threshold
Initail value
Unit
Communication
Address
20
rpm
212BH
Control Mode
:
S
Range
:
1
~
3000
Data size
:
16bit
Display mode
:
Decimal system
Parameter function
:
When | given speed-current speed |
≤
P1-43, it reaches the set speed. If any DO terminal is set no.6 function
(
speed reaches/ V-CMP+-
)
, the
terminal output effective.
/V-CMP+-
effective
Given speed
speed
/rpm
Actual speed
effective
/V-CLS+-
Actual speed
P1-43
P1-42
Actual speed
Actual speed
P1-43
P1-42
Figure7-12 speed approaches and reaches threshold
P1-44
Simulation speed instruction zero fixed
value
Initail
value
Unit
Communication
Address
/TGON+-
Low level
effective
P1-41
speed/rpm
time/S
P1-40
Low level
effective
/ZERO+-







































































