




























44
Parameters
Function
Initial
value
Unit
Applicable
control
mode
Property
Communica
tion
address
P S T
1: Multi section speed automatic
switch,
not cycle
2: Multi section speed external Di
switch
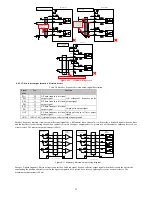
P1-07
Frequency dividing output
2500 ppr
√
√
√
●
2107H
P1-08
Torque command selection:
0: Internal digital given (given by
P4-00)
1: Analog value 1 given (AI1)
2: Analog value 2 given (AI2)
3: Not used
0
-
√
○
2108H
P1-09
Speed feedback filter time constant
500
us
√
√
√
○
2109H
P1-10
First group of resonance frequency
setting value
1000 Hz
√
√
○
210AH
P1-11
First group of resonance points in the
notch depth
0
dB
√
√
○
210BH
P1-12
Internal position command
acceleration time T
PACC
100
ms
√
☆
210CH
P1-13
Internal position command
deceleration time T
PDEC
100
ms
√
☆
210DH
P1-14
Internal position command S curve
smoothing time T
PL
10
ms
√
☆
210EH
P1-15
External pulse command smoothing
filter time constant
0
ms
√
○
210FH
P1-16
Speed command acceleration time
T
SACC
200
ms
√
☆
2110H
P1-17
Speed command deceleration time
T
SDEC
200
ms
√
☆
2111H
P1-18
Speed command S curve smoothing
time T
SL
50
ms
√
☆
2112H
P1-19
Speed command low-pass filter
smoothing filter time constant
10. 0 ms
√
○
2113H
P1-20
Analog speed command gain
3000 rpm
√
○
2114H
P1-21
Current feedback low-pass
smoothing constant
100
us
√
√
√
○
2115H
P1-22
Torque command low-pass
smoothing constant
100
us
√
√
√
○
2116H
P1-23
The torque command when analog
maximum input (10V)
100
%
√
○
2117H
P1-24
Second group of resonance
frequency setting value
1000 Hz
√
√
○
2118H
P1-25
Second group of resonance points in
the notch depth
0
dB
√
√
○
2119H
P1-26
Electronic gear ratio factor
0
-
√
○
211AH
P1-27
Electronic gear molecular 1
1
-
√
○
011BH*
211BH*
P1-28
Electronic gear denominator
1
-
√
○
011CH*
211CH*
P1-29
Electronic gear molecular 2
1
-
√
○
011DH*
211DH*
P1-30
Electronic gear molecular 3
1
-
√
○
011EF*
211EH*
P1-31
Electronic gear molecular 4
1
-
√
○
011FH*
211FH*
P1-32
Position approaching width
When the fault counter is less than
the setting value, it will export
position approaching signal
20
ppr
√
○
2120H
P1-33
Position complete width
10
ppr
√
○
2121H
P1-34
Action selection to remove position
deviation by external DI signal
0: By rising edge of P-CLR
1: By low level of P-CLR
2: By high level of P-CLR
0
-
√
○
2122H







































































