





























SYSTEM DESCRIPTION
3
37
8017768/12AX/2019-05-31|SICK
Subject to change without notice
O P E R A T I N G I N S T R U C T I O N S | TIC
•
In a second step, the shadow patterns undergo a plausibility check. This means that
each shadowed area is checked to see whether there is a corresponding point pattern
for a wheel.
Every wheel detected is counted as one axle. Twin wheels count as one axle. Wheels on
a raised axle (at least 10 cm above the ground) will not be counted.
Fig. 29: Operating principle of axle counting – Wheel detection using a point pattern
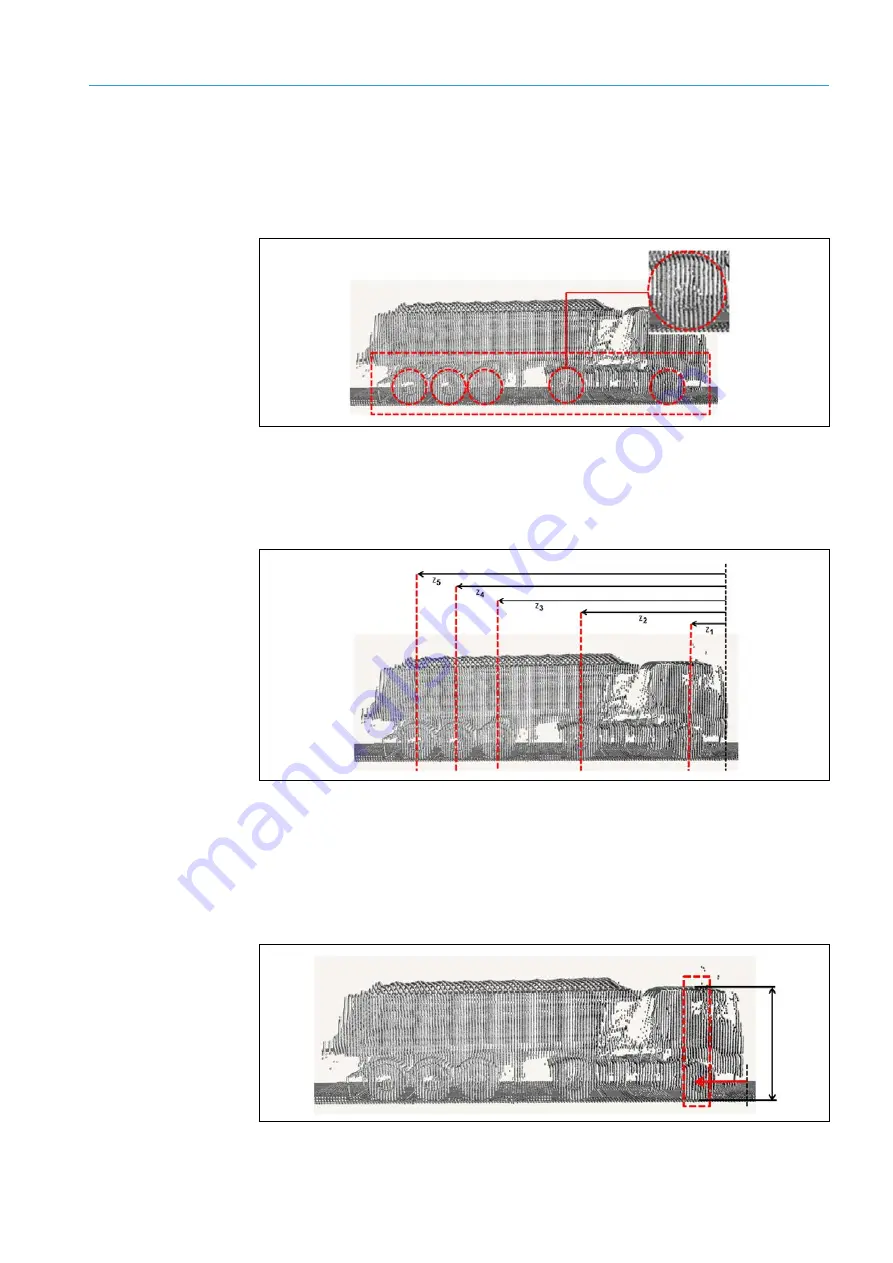
Calculating axle positions
The axle positions are determined on the basis of the point cloud starting from the front of
the vehicle.
Fig. 30: Operating principle of axle counting – Determining the position of the axles
Calculating vehicle height above the first axle
For the calculation of the vehicle height above the first axle, the profile cross-sections
and the 3D point cloud recorded by the LMS Axle are used to search for the existence
of an axle within the first 2 meters of the vehicle. The position of the first axle is used
to calculate the height of the vehicle in this area.
Fig. 31: Axle counting op – Vehicle height above the first axle







































































