





























M2DC Series Hardware Manual
120
Rev. 1.1
2018/04
400-820-9661
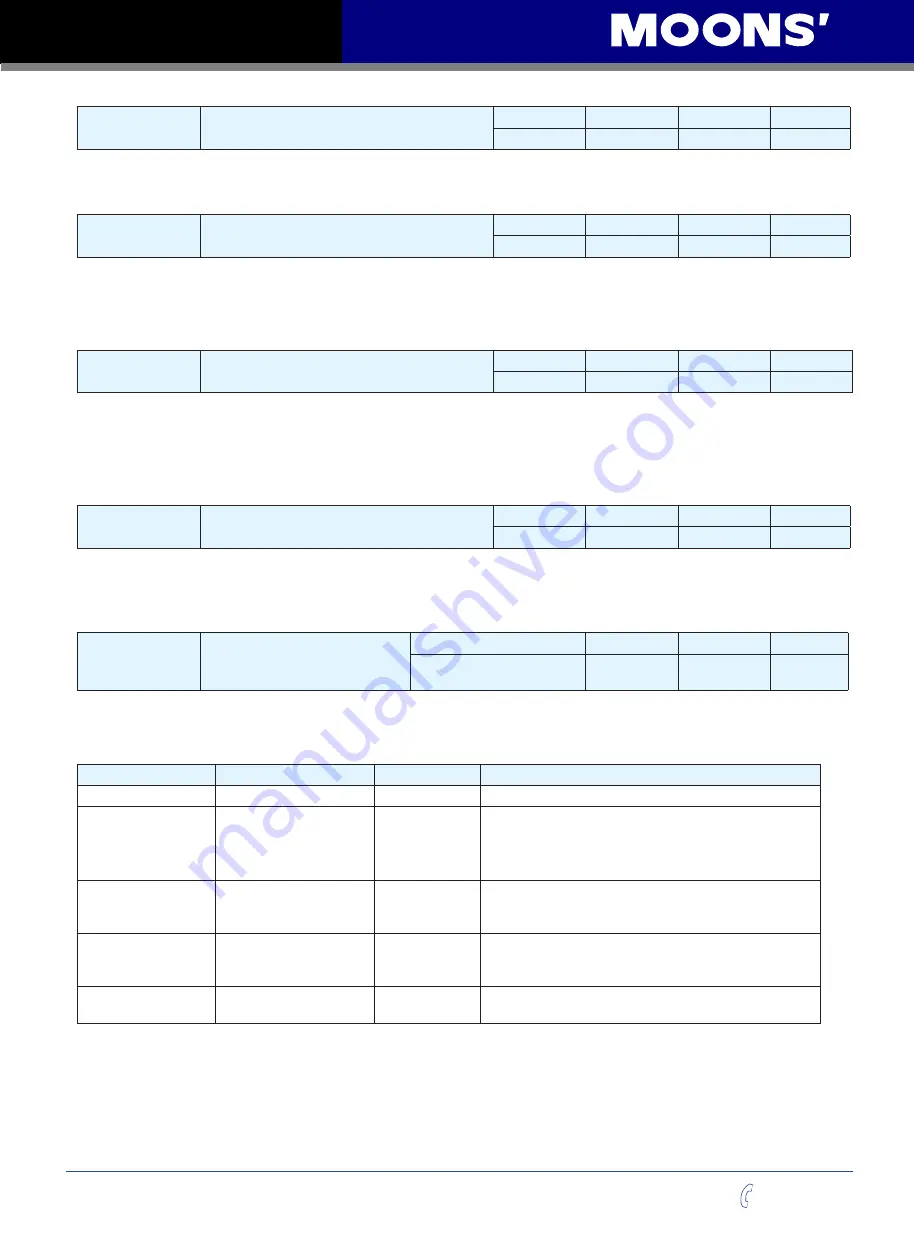
P-08 (VP)
Velocity Loop Proportional Gain
Data Range
Default
Unit
Data type
0~32767
15000
------
DEC
The velocity-mode servo control proportional gain term. Gain value is relative: “0” meaning no gain,
“32767” meaning full gain. VP minimizes velocity error when in velocity mode 2.
P-09 (VI)
Velocity Loop Integral Gain
Data Range
Default
Unit
Data type
0~32767
600
------
DEC
The velocity-mode (“JM2”) servo control integrator gain term. Gain value is relative: “0” meaning no gain,
“32767” meaning full gain. VI minimizes steady state velocity errors.
P-10 (KE)
Deriv Filter factor
Data Range
Default
Unit
Data type
0~32767
15000
------
DEC
The differential control parameters filter frequency. The filter is a simple one-pole, low-pass filter intended
for attenuating high frequency oscillations. The value is a constant that must be calculated from the
desired roll-off frequency.
P-11 (KC)
PID Filter factor
Data Range
Default
Unit
Data type
0~32767
20000
------
DEC
The servo control overall filter frequency. The filter is a simple one-pole, low-pass filter intended for
attenuating high frequency oscillations. The value is a constant that must be calculated from the desired
roll-off frequency.
P-12 (CM)
Main control mode
Data Range
Default
Unit
Data type
1~8,11,12,
15~18,21,22,25
7
------
DEC
Parameter P-12 (CM) is used to set drive’s control mode.
Parameter mode list are as follows:
Mode
Control Signal
P-12 (CM)
Description
SCL command mode
SCL command
1
Use SCL command to control motor’s output torque
Analog input torque
mode
+10 - -10V analog signal
2
Use external analog voltage input signal to control
motor’s output torque.
Analog torque mode: No run/stop signal,
No direction signal.
Analog input torque
mode
+10 - -10V analog signal
3
Analog torque mode: no run/stop signal;
X2 is closed, motor will change its current rotary
direction.
Analog input torque
mode
+10 - -10V analog signal
4
Analog torque mode: no run/stop signal;
X2 is open, motor will change its current rotary
direction.
Analog input torque
mode
+10 - -10V analog signal
5
Analog torque mode: X1 for run/stop signal,
No direction signal.







































































