





























M2DC Series Hardware Manual
36
Rev. 1.1
2018/04
400-820-9661
4.4 STO Connector
On the M2DC series servo drives, the STO (Safe Torque Off) function is connected via port CN5. The
STO function shuts off the motor current turning off the motor output torque by forcibly turning off the
signal of the servo driver power transistor. This is done internally through the STO Input/Output signal
circuit.
4.4.1 Safety Precautions
• If the STO function does not trigger, make sure the STO connector is plugged into CN5 on the drive
correctly.
• When using the STO function, perform an equipment risk assessment to ensure that the system
conforms to the safety requirements.
• Even when the STO function is enabled, the servo motor may move due to external force (e.g.
gravitational force on the vertical axis). Make sure a holding brake is used in applications where this is
possible.
• When the STO function engages and removes the torque, the motor will be “free running”, requiring
more distance until the motion stops. Make sure this will not be a safety issue.
• When the STO function operates, it will turn off the current to the motor, but it does not turn off the
power to the servo drive. Make sure to disconnect the power to the drive before performing any
maintenance on it.
• After the STO function is triggered, the drive will have a fault alarm status(Alarm code:
), and
the motor will be disabled.
• After the STO signal return to normal, the drive will automatically clear the STO fault alarm, but the
motor will remain disabled . To restore the system to normal operation, re-enable is needed.
4.4.2 STO Input/Output Signals
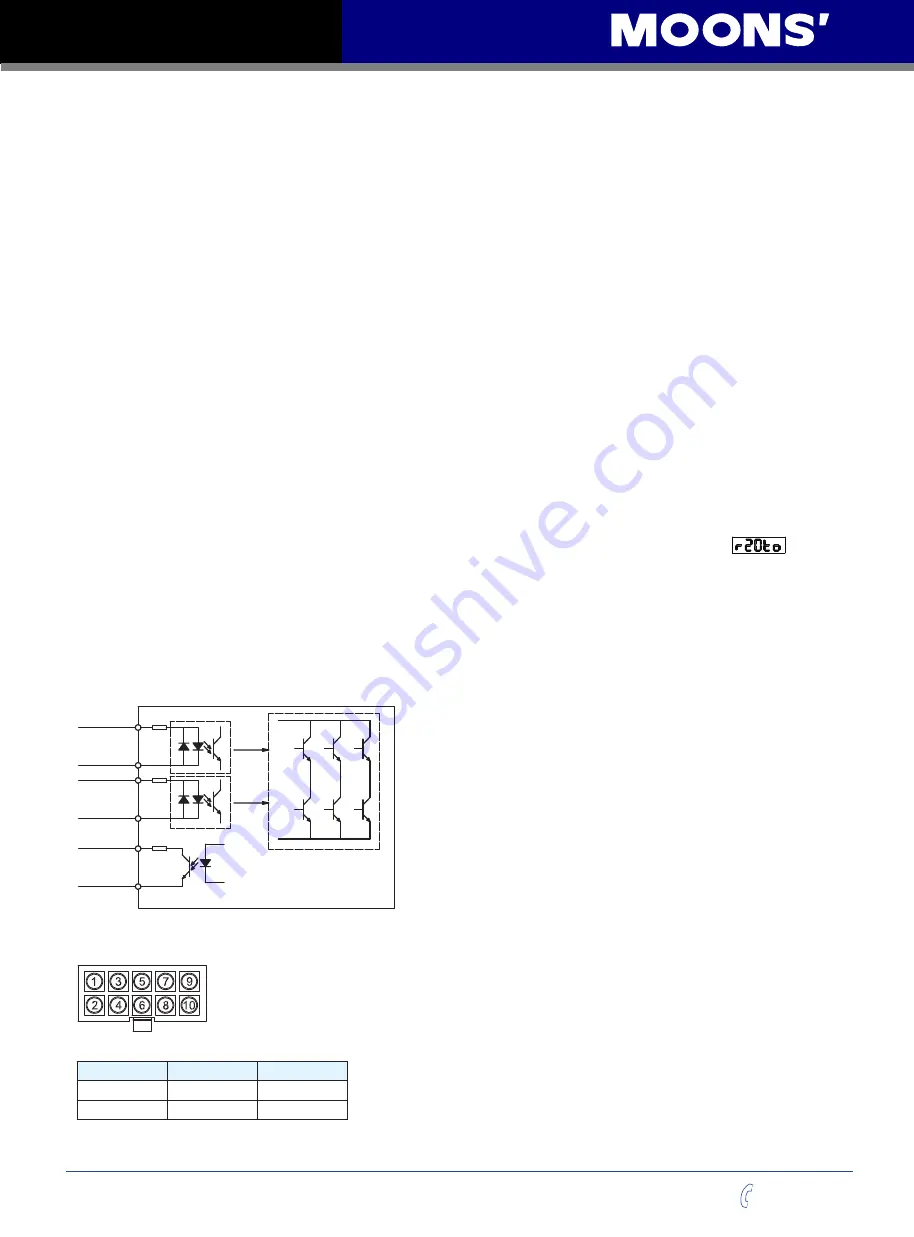
4.4.2.1 STO Internal Circuit Diagram
SF1+
SF1-
SF2+
SF2-
EDM+
EDM-
1.5K
1.5K
4.4.2.2 CN5 Connector diagram
Item
Part number
Vendor
Housing
43025-1000
Molex
Crimp
43030-0005
Molex







































































