





























Function overview
Page 63
5.3.6
Positioning sequences
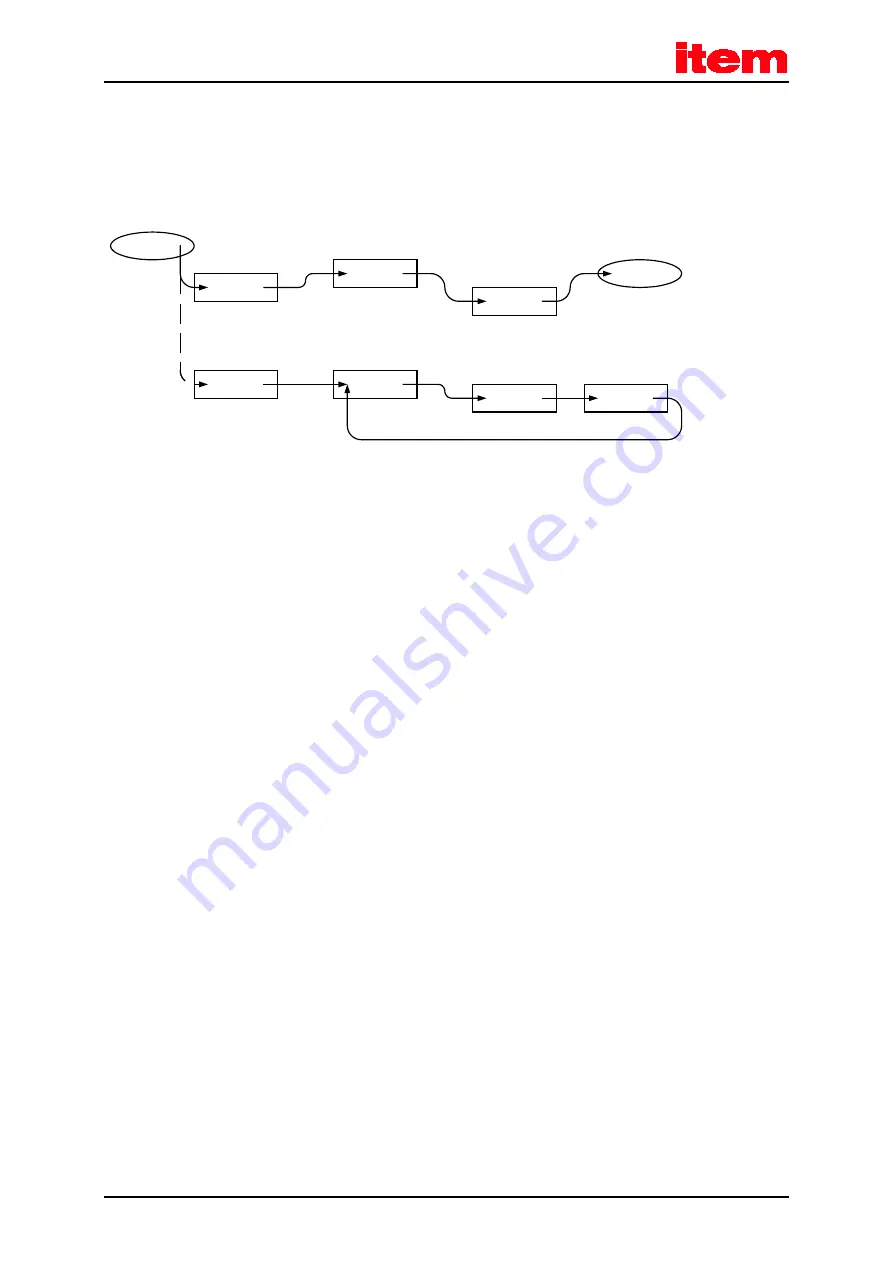
Positioning sequences consist of a series of positioning sets. These are run consecutively. A positioning set can be made part
of a path program by means of its path program options, thus generating a linked list of positions:
POS1
POS13
POS19
START
END
POS5
POS6
POS7
POS8
Figure 6:
Path program
Via the start position of the path program the user determines which position series to run. In principle, linear or cyclic series
are possible.
The start position of a path program can be determined:
via fieldbus
via digital inputs
The number of positions in the corresponding positioning sequence is only limited by the number of totally available positions.
Every user-defined positioning set (0 to 255) can be used in the path program.
For further information, please refer to the software manual “item Servo Positioning Controller C Series”.
5.3.7
Optional stop input
The optional stop input can interrupt the ongoing positioning by setting the selected digital input. Resetting the digital input will
resume positioning to the original target position.
5.3.8
Contouring control with linear interpolation
The implementation of the Interpolated Position Mode allows setting position values in a multi-axis application of the controller.
For that purpose set position values are provided by a superordinated control at a fixed time pattern (synchronisation interval).
If this interval exceeds a position control cycle, the controller autonomously interpolates the data values between two set
position values, as shown in the following illustration. The servo positioning controller also calculated a corresponding speed
feed forward.







































































