





























Communication extension card
CANopen object dictionary
-100-
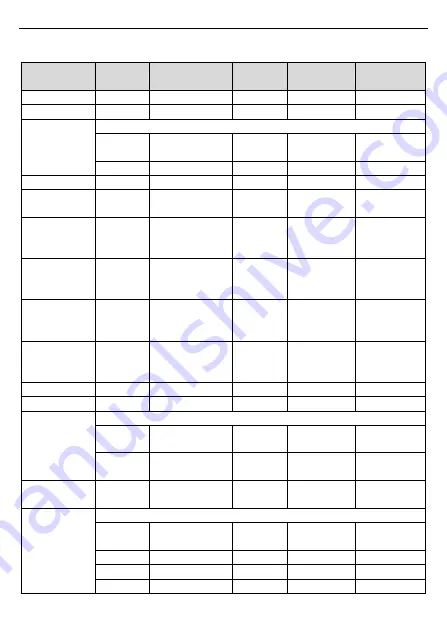
Appendix A CANopen object dictionary
Index
(hexadecimal)
Subindex
Description
Access
permission
Data type
Default value
1000
0
Device type
RO
Unsigned32
0x0000 0000
1001
0
Error register
RO
Unsigned8
/
1003
Error code register
0
Number of
subindexes
RW
/
/
1
Error code
RO
Unsigned32
/
1005
0
COB-ID SYNC
RW
Unsigned32
/
1006
0
Communication
cycle period
RW
Unsigned32
/
1007
0
Length of
synchronous
window
RW
Unsigned32
/
1008
0
Manufacturer-
defined device
name
CONST
String
INVT
CANopen
1009
0
Manufacturer-
defined hardware
version
CONST
String
V1.00
100A
0
Manufacturer-
defined software
version
CONST
String
V1.00
100C
0
Protection time
RW
Unsigned16
0
100D
0
Life cycle factor
RW
Unsigned16
0
1016
Consumer heartbeat time
0
Number of
subindexes
RO
Unsigned8
/
1
Consumer
heartbeat time
RW
Unsigned32
/
1017
0
Producer
heartbeat time
RW
Unsigned16
0
1018
Identifier objects
0
Number of
subindexes
RO
Unsigned8
4
1
Supplier ID
RO
Unsigned32
0x0000 0000
2
Product code
RO
Unsigned32
0x0000 0000
3
Revision No.
RO
Unsigned32
0x0000 0000
Summary of Contents for Goodrive350 Series
Page 1: ......
Page 104: ...Communication extension card EtherCAT communication card 99...
Page 135: ...66001 00600 202004 V1 2...







































































