























Triton Go Product Manual |
Wiring and Connections
INGENIA | 05/29/2017
108
7.7.3 CANopen interface
Triton Go Servo Drive with CAN (TRI-x/xx-C-C) provides access to the CANopen interface, a multi-terminal
communication protocol based on CAN (Controller Area Network) bus. Triton Go CAN interface is isolated, and
self-supplied. Main physical specifications are shown in the next table:
Specification
Details
Interface
Non-isolated. Self-supplied (no need for external supply)
Baud rate
From 125 kbps to 1 Mbps (default value)
Maximum number of nodes
64
Common mode voltage
Up to 36 V
Termination resistor
120 Ω on board (externally connect CAN_TERM to CAN_L to enable)
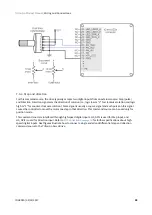
Since Triton Go has two CAN connectors, wiring from previous device and to next device can be done using
different connectors (CAN IN and CAN OUT).
Pins 2, 3 and 4 of those connectors are connected pin-to-pin
.
The unique difference is in pin 1, which is not connected in CAN IN and connected to the termination resistor in
CAN_OUT. An example of CAN wiring is shown in the next figure.
Drive ID
When installing CANopen communication, ensure that each servo drive is allocated a unique ID.
Otherwise, CANopen network may hang.
CAN GND connection
GND line in CAN devices is used for equaling potential between master and slaves, but is not used for
data transmission, as the line is fully differential. For this reason, if the
host device shares supply GND
with Triton Go
it is not needed to connect CAN connector GND again
, as this could cause ground
loop issues.






































































