





























21: T
RIGONOMETRIC
F
UNCTION
I
NSTRUCTIONS
21-2
FT1A S
MART
A
XIS
U
SER
’
S
M
ANUAL
FT9Y-B1382
DEG (Radian to Degree)
Applicable CPU Modules
Valid Devices
For the valid device address range, see pages 6-1 and 6-2
(Basic Vol.).
When the conversion result is not within the range between –3.402823
10
38
and –1.175495
10
–38
or between 1.175495
10
–38
and 3.402823
10
38
, special internal relay M8003 (carry or borrow) is turned on except when the conversion result is 0. When the conversion result is below –
3.402823
10
38
or over 3.402823
10
38
, causing an overflow, the destination device designated by D1 stores a value of minus or plus infinity.
When the data designated by S1 does not comply with the normal floating-point format, a user program execution error will result, turning on
special internal relay M8004 and ERR LED on the CPU module. For details about the user program execution errors, see Chapter 4 “User Program
Execution Errors” on page 4-21.
Since the DEG instruction is executed in each scan while input is on, a pulse input from a SOTU or SOTD instruction should be used as required.
Valid Data Types
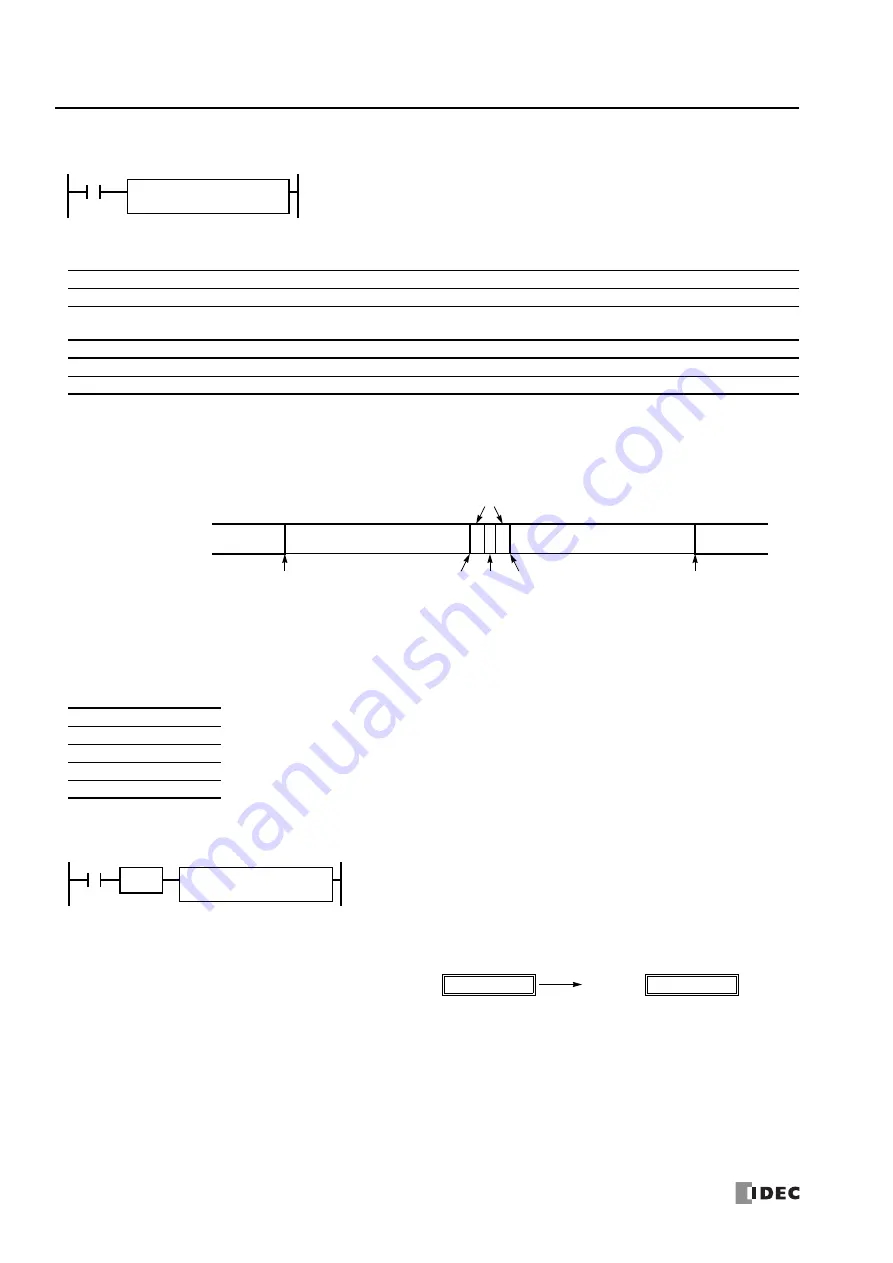
Example: DEG
S1·S1+1 rad
180/
D1·D1+1°
When input is on, the radian value designated by source device S1 is converted into a degree
value and stored to the destination designated by device D1.
DEG(F)
S1
*****
D1
*****
FT1A-12
FT1A-24
FT1A-40
FT1A-48
FT1A-Touch
X
X
X
X
X
Device
Function
I
Q
M
R
T
C
D
Constant
Repeat
S1 (Source 1)
Radian value to convert into degree
—
—
—
—
—
—
X
X
—
D1 (Destination 1)
Destination to store conversion results
—
—
—
—
—
—
X
—
—
0
–1.175495
10
–38
M8003
1
1
1.175495
10
–38
0
–3.402823
10
38
0
Execution Result
1
Overflow
0
1
3.402823
10
38
Overflow
Not Zero
W (word)
—
Since the floating point data type is used, the source and destination devices use two consecutive data registers.
I (integer)
—
D (double word)
—
L (long)
—
F (float)
X
When input I1 is turned on, the radian value of data registers D10 and D11 designated
by source device S1 is converted into a degree value and stored to data registers D20
and D21 designated by destination device D1.
4.712389 rad
180/
270.0°
I1
S1
D10
DEG(F)
D1
D20
SOTU
D1
S1
4.712389
D10·D11
270.0
D20·D21
Summary of Contents for microsmart pentra
Page 1: ...FT1A SERIES FC9Y B1382 Ladder Programming Manual ...
Page 6: ...Preface 5 FT1A SMARTAXIS USER S MANUAL FT9Y B1382 ...
Page 104: ...7 DATA COMPARISON INSTRUCTIONS 7 10 FT1A SMARTAXIS USER S MANUAL FT9Y B1382 ...
Page 122: ...8 BINARY ARITHMETIC INSTRUCTIONS 8 18 FT1A SMARTAXIS USER S MANUAL FT9Y B1382 ...
Page 138: ...10 SHIFT ROTATE INSTRUCTIONS 10 12 FT1A SMARTAXIS USER S MANUAL FT9Y B1382 ...
Page 162: ...11 DATA CONVERSION INSTRUCTIONS 11 24 FT1A SMARTAXIS USER S MANUAL FT9Y B1382 ...
Page 188: ...12 CALENDAR COMPARISON INSTRUCTIONS 12 26 FT1A SMARTAXIS USER S MANUAL FT9Y B1382 ...
Page 198: ...15 REFRESH INSTRUCTIONS 15 4 FT1A SMARTAXIS USER S MANUAL FT9Y B1382 ...
Page 202: ...16 INTERRUPT CONTROL INSTRUCTIONS 16 4 FT1A SMARTAXIS USER S MANUAL FT9Y B1382 ...
Page 266: ...20 DUAL TEACHING TIMER INSTRUCTIONS 20 4 FC5A MICROSMART USER S MANUAL FC9Y B1273 ...
Page 318: ...25 USER COMMUNICATION INSTRUCTIONS 25 22 FT1A SMARTAXIS USER S MANUAL FT9Y B1382 ...







































































