-
73
-
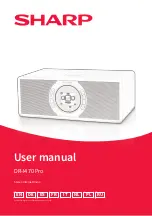
■ Absolute Time of Point Cloud Data Packets
Definition
·
Every time the lidar passes a fixed time Δt or azimuth interval Δα (see Section 4.2 Web Control – Trigger Method), it sends a command that
triggers a round of firing.
·
A round of firing can have either one or more returns (specified in Section 4.2 Web Control – Return Mode). The measurements of each
return are stored in one block (see Section 3.1.2 UDP Data – Body).
·
The absolute time of a Point Cloud Data Packet is the time when the lidar sends the command that triggers a round of firing that will be
stored in the last block.
This absolute time is output to the Date & Time field and the Timestamp field in Point Cloud Data Packets.
Δt or Δα
···
Point Cloud
Data Packet
···
···
t0
t1
t2
tT
t3
absolute time of the Point
Cloud Data Packet
Block 1
Block 2
Block 3
Block 4
Block M-1
Block M
A round of firing
Last
Ch 1
Ch 2
...
Ch N
Strongest
Ch 1
Ch 2
...
Ch N
A round of firing
Last
Ch 1
Ch 2
...
Ch N
Strongest
Ch 1
Ch 2
...
Ch N
A round of firing
Last
Ch 1
Ch 2
...
Ch N
Strongest
Ch 1
Ch 2
...
Ch N
Return selected
according to Return
Mode, taking dual-return
(last and strongest) as an
example
Trigger
firing
Summary of Contents for PandarXT
Page 1: ...www hesaitech com HESAI Wechat PandarXT 32 Channel Medium Range Mechanical LiDAR User Manual...
Page 19: ...17 2 Setup 2 1 Mechanical Installation Figure 2 1 Front View Unit mm...
Page 20: ...18 Figure 2 2 Bottom View Unit mm...
Page 21: ...19 2 1 1 Recommended Installation Figure 2 3 Recommended Installation...
Page 29: ...27 2 3 2 Connection Figure 2 9 Connection Box Connection with GPS...
Page 30: ...28 Figure 2 10 Connection Box Connection with PTP...