





























Setup & Operation 5. Motion Range
VT Rev.1
59
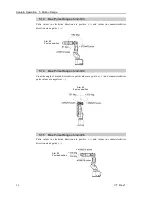
5.3 Restriction of Manipulator Operation by Joint Angle Combination
To prevent the arms of the Manipulator from interfering each other, the Manipulator
operation is restricted in the specified motion range according to the joint angle
combination of the Arm #1, #2, and #3.
The Manipulator operation is restricted and the Manipulator stops when the joint angles of
the Arm are within the gray areas in the following figure.
The restriction to Manipulator operation is enabled:
-
During CP motion command execution
-
When you attempt to execute the motion command for moving the Manipulator to a
target point (or pose) in the specified motion range.
The restriction to the Manipulator operation is disabled:
-
The Arms of the Manipulator momentarily go through the specified motion range
during the PTP motion command execution even though the joint angles of the Arms are
in the colored area of the figures above.
Combination of Joint #2 and #3
J1:
−
110 deg ~ 110 deg
Joint #2 Angle
J
oi
n
t
#3
A
ngl
e
J1:
−
110 deg ~
−
170 deg or 110 deg ~ 170 deg
Joint #2 Angle
J
oi
n
t
#3
A
ngl
e
Summary of Contents for VT Series
Page 1: ...6 Axis Robots VT series MANIPULATOR MANUAL Rev 1 EM18YR3817F ...
Page 2: ...MANIPULATOR MANUAL VT series Rev 1 ...
Page 8: ...vi VT Rev 1 ...
Page 16: ...TABLE OF CONTENTS xiv VT Rev 1 ...
Page 18: ......
Page 31: ...Setup Operation 2 Specifications VT Rev 1 15 2 4 Outer Dimensions ...
Page 32: ...Setup Operation 2 Specifications 16 VT Rev 1 Unit mm ...
Page 33: ...Setup Operation 2 Specifications VT Rev 1 17 2 5 Standard Motion Range Unit mm ...
Page 130: ......
Page 138: ...Maintenance 3 Manipulator Structure 122 VT Rev 1 3 Manipulator Structure ...
































































