





























Setup & Operation 4. Setting of End Effectors
VT Rev.1
51
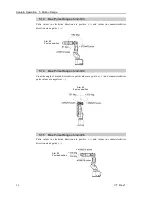
(c) Inertia moment of a sphere
m
r
2
+ m
×
L
2
2
5
Sphere’s Center of Gravity
r
Weight = m
L
Rotation Center
4.4 Precautions for Auto Acceleration/Deceleration of Joint #3
The speed and acceleration/deceleration of the Manipulator motion are automatically
optimized according to the values of WEIGHT and INERTIA and the Manipulator’s
postures.
WEIGHT Setting
The speed and acceleration/deceleration of the Manipulator are controlled according to the
load weight set by the WEIGHT command.
The more the load weight increases, the more the speed and acceleration/deceleration are
reduced to prevent residual vibration.
INERTIA Setting
The acceleration/deceleration of Arm #6 are controlled according to the inertia moment set
by the INERTIA command. The acceleration/deceleration of the whole Manipulator are
controlled according to the eccentricity set by the INERTIA command. The more the
inertia moment and eccentricity of the load increase, the more the acceleration/
deceleration are reduced.
Auto Acceleration/Deceleration According to Manipulator’s Posture
The acceleration/deceleration are controlled according to the Manipulator’s posture.
When the Manipulator extends its arms or when the movement of the Manipulator
produces vibration frequently, the acceleration/deceleration are reduced.
Set appropriate values for WEIGHT and INERTIA so that the Manipulator operation is
optimized.
Summary of Contents for VT Series
Page 1: ...6 Axis Robots VT series MANIPULATOR MANUAL Rev 1 EM18YR3817F ...
Page 2: ...MANIPULATOR MANUAL VT series Rev 1 ...
Page 8: ...vi VT Rev 1 ...
Page 16: ...TABLE OF CONTENTS xiv VT Rev 1 ...
Page 18: ......
Page 31: ...Setup Operation 2 Specifications VT Rev 1 15 2 4 Outer Dimensions ...
Page 32: ...Setup Operation 2 Specifications 16 VT Rev 1 Unit mm ...
Page 33: ...Setup Operation 2 Specifications VT Rev 1 17 2 5 Standard Motion Range Unit mm ...
Page 130: ......
Page 138: ...Maintenance 3 Manipulator Structure 122 VT Rev 1 3 Manipulator Structure ...
































































