




























Setup & Operation 3. Environments and Installation
32
VT Rev.1
3.7 Connecting the Cables
WARNING
■
To shut off power to the robot system, disconnect the power plug from the power
source. Be sure to connect the AC power cable to a power receptacle.
DO NOT connect it directly to a factory power source.
■ Before performing any replacement procedure, turn OFF the Controller and
related equipment, and then disconnect the power plug from the power source.
Performing any replacement procedure with the power ON is extremely
hazardous and may result in electric shock and/or malfunction of the robot
system.
■ Be sure to connect the cables properly. Do not allow unnecessary strain on the
cables. (Do not put heavy objects on the cables. Do not bend or pull the cables
forcibly.) The unnecessary strain on the cables may result in damage to the
cables, disconnection, and/or contact failure.
Damaged cables, disconnection, or contact failure is extremely hazardous and
may result in electric shock and/or improper function of the robot system.
■ Grounding the manipulator is done by connecting with Power cable. Ensure that
the Power cable and ground wire are correctly connected. If the ground wire is
improperly connected to ground, it may result in the fire or electric shock.
CAUTION
■
Make sure that the serial numbers on each equipment match. Improper
connection between the Manipulator and Controller may not only cause
improper function of the robot system but also serious safety problems.
■
Before connecting the connector, make sure that the pins are not bent.
Connecting with the pins bent may damage the connector and result in
malfunction of the robot system.
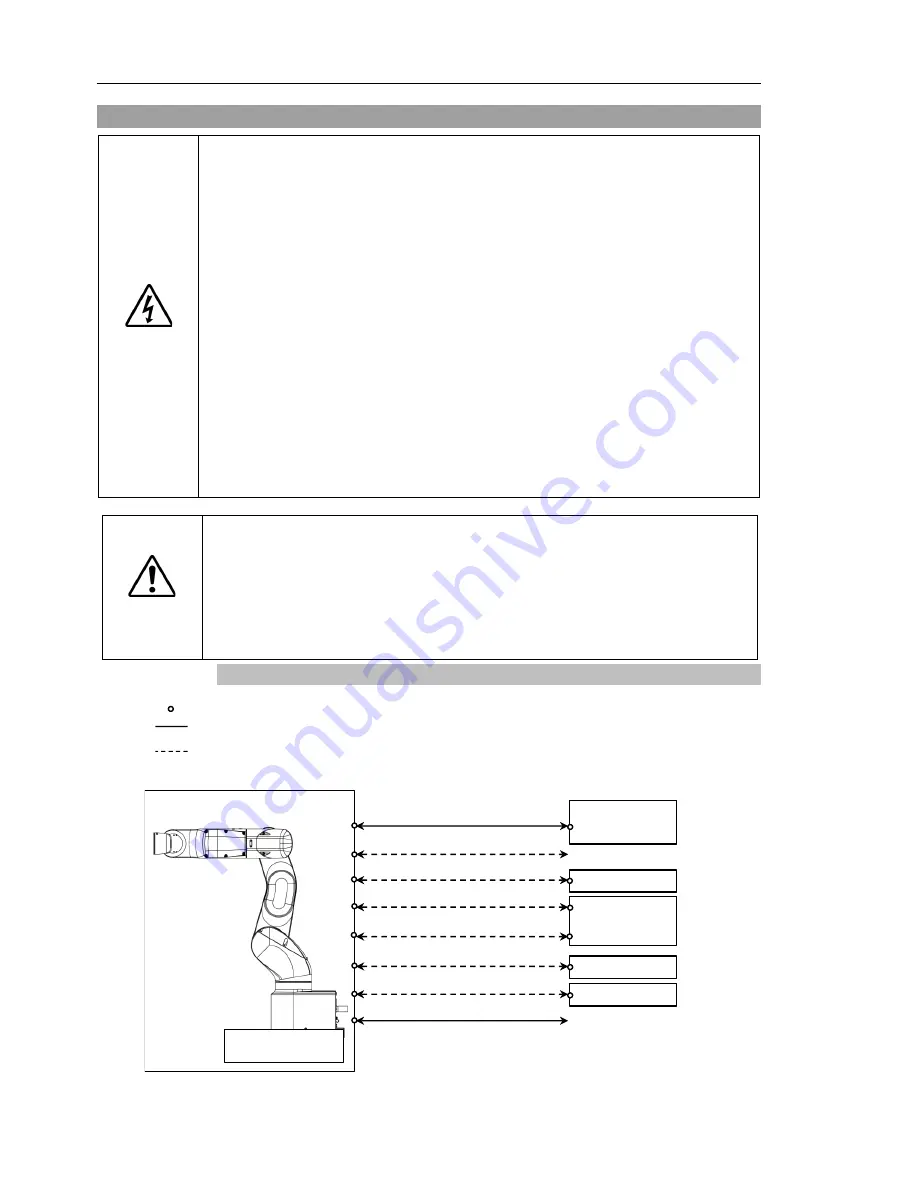
3.7.1 Connection Example
Detachable connector
Supplied cable
Not supplied cable (Prepare by yourself)
AC 100V-240V
Output device
PC for
development
USB memory
Emergency stop, safety door
Manipulator
Teach
Pendant
Input device
Option
Fieldbus I/O
(1) TP connector
(2) EMERGENCY connector
(3) Memory port
(4) PC port for development
(5) LAN (Ethernet
)
(6) I/O(Input) connector
(7) I/O(Output) connector
(8) AC power connector
Summary of Contents for VT Series
Page 1: ...6 Axis Robots VT series MANIPULATOR MANUAL Rev 1 EM18YR3817F ...
Page 2: ...MANIPULATOR MANUAL VT series Rev 1 ...
Page 8: ...vi VT Rev 1 ...
Page 16: ...TABLE OF CONTENTS xiv VT Rev 1 ...
Page 18: ......
Page 31: ...Setup Operation 2 Specifications VT Rev 1 15 2 4 Outer Dimensions ...
Page 32: ...Setup Operation 2 Specifications 16 VT Rev 1 Unit mm ...
Page 33: ...Setup Operation 2 Specifications VT Rev 1 17 2 5 Standard Motion Range Unit mm ...
Page 130: ......
Page 138: ...Maintenance 3 Manipulator Structure 122 VT Rev 1 3 Manipulator Structure ...





































































