





























Electrical Operation and Maintenance Manual for ER15-1400 Industrial Robot
61
the robot and the verification test of the accuracy of related home position.
4.7 Quick Recovery Method of Home Position
Before the robot leaves the factory, it has been calibrated with special equipment for home
position. After the calibration is completed, the home position of each axis is marked by the zero
block to prevent the home position from being lost due to improper use by the user. When the
robot loses its home position due to a malfunction or improper operation, it is necessary to
perform the robot home position recovery work again on the robot.
The home position recovery function refers to the function of quickly recovering the normal
home position value when the robot loses its home position value due to abnormal operations such
as the encoder battery stopping power supply or the removal of the motor.
The login password of home position recovery authority management for the robot is
1975
.
When the robot replaces the encoder battery or replaces the motor, the robot needs to clear the
multi-turn value. Before the replacement, the robot needs to return to the home position. After the
replacement, clear the multi-turn value, power off and restart. When the robot runs to the
mechanical home position, record the current position as the home position.
Please refer to "Efort Industrial Robot Operation Manual" and "ER15-1400 Industrial Robot
Mechanical Maintenance Manual" for details of the steps of quick recovery of home position.
Note: Before using this function, you need to align the mechanical home position mark
manually roughly. This function is a correction function for the home position mark
manually and cannot directly restore the home position at any angle.
The steps of the home position recovery are as follows:
Step
Illustrations
Description
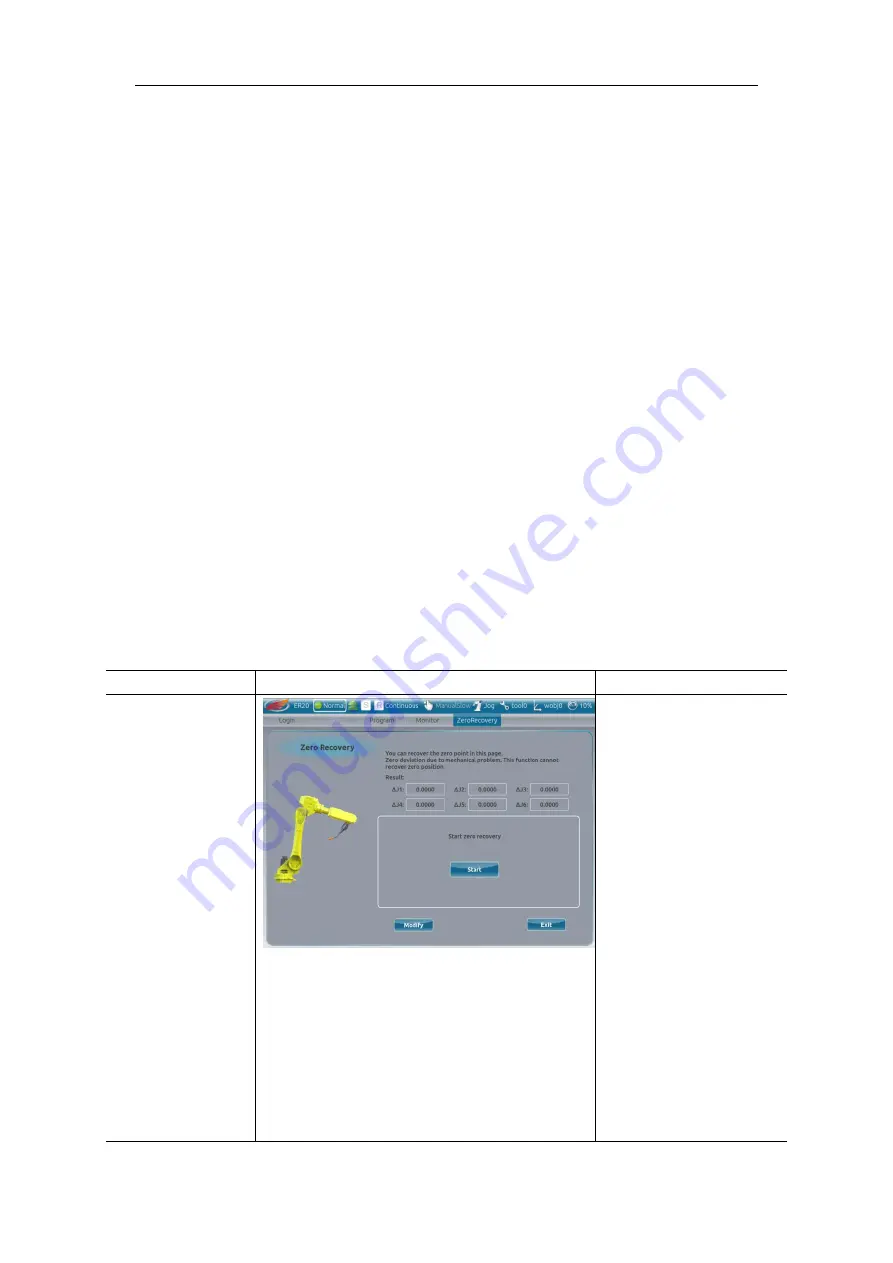
1
.
Click the "
Home
position recovery
"
icon to enter the
main page.
The calculation result
refers to the difference
between the current
position of the robot and
the original home position
recorded by the controller.
Click the "Modify" button
to enter the interface for
modifying the encoder's
single loop value of home
position file. The operation
mode is the same as step 3.





















































