





























C
ONFIGURATION
M
ODE
D
ATA
F
ORMAT
Networked Indexer/Driver User Manual
ADVANCED MICRO CONTROLS INC.
66
Input Data Format
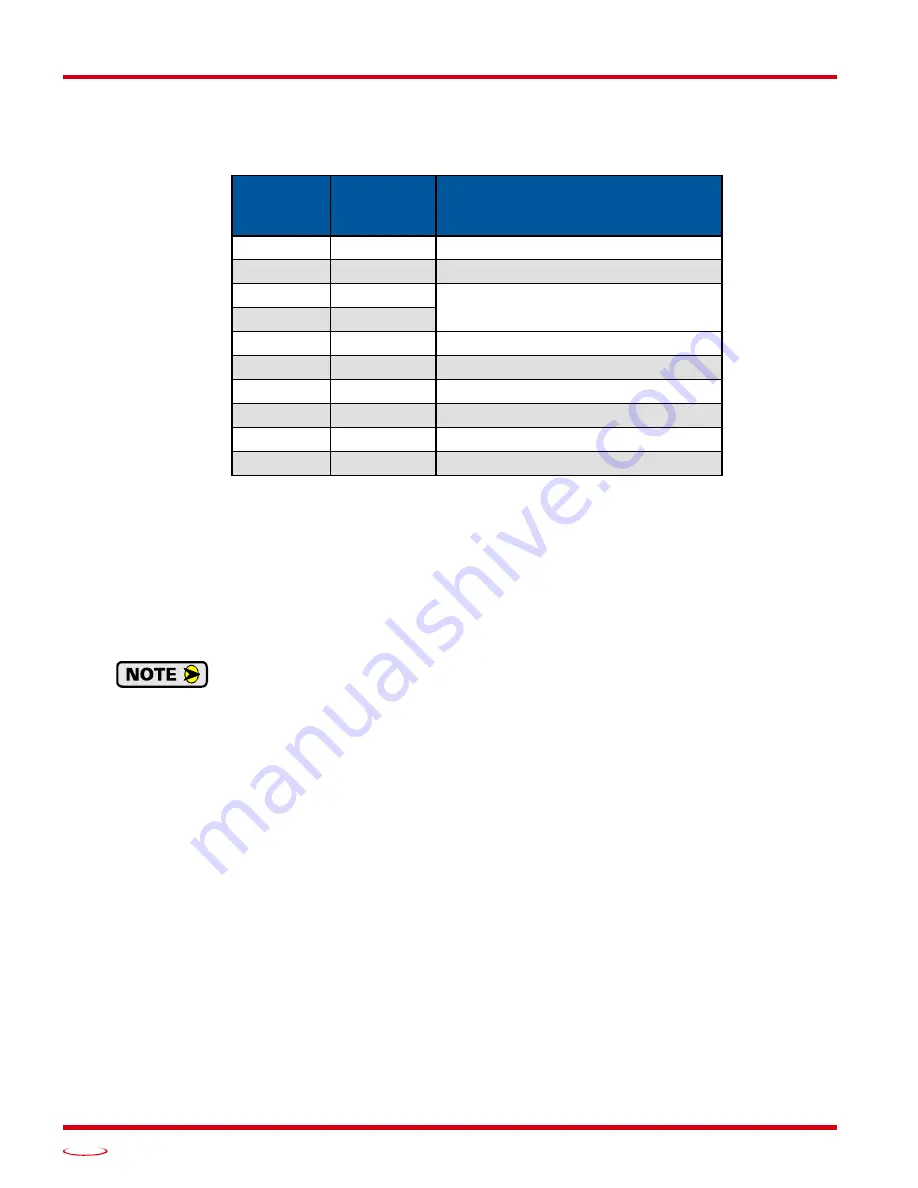
The correct format for the Network Input Data when the Networked Driver is in Configuration Mode is
shown below.
Table R6.5 Network Input Data Format: Configuration Mode
Configuration Word 0 Format
When the Configuration data is valid and accepted, this word mirrors the value of the Configuration Word 0
written to the Networked Driver. When the Networked Driver is not configured, or the data written to it is
invalid, then this word has the same format of Status Word 0 when the Networked Driver is in Command
Mode. This format is explained in the
section starting on page 83. On power up, the
value of this word will be 6408h if the Networked Driver does not have a valid configuration in its flash
memory.
When in Configuration Mode, bit 13 of word 0 is set to “1” when stall detection is enabled.
When in Command Mode, bit 13 of word 0 is set to “1” when there is a configuration error.
When using the state of bit 13 of word 0 in your logic, always include the state of bit 15 of
word 0 to assure that you are only acting on the bit when in the proper mode.
Invalid Configurations
The following configurations are invalid:
1) Setting any of the reserved bits in the configuration words.
2) Setting any parameter to a value outside of its valid range. This includes setting the Lower Word of
the Starting Speed to a value greater than 999.
3) You configure two or more inputs to have the same function, such as two CW Limit Switches.
4) You configure the Networked Driver to use an encoder, but you do not configure Inputs 1 and 2 as
Quadrature Encoder Inputs.
5) You configure the Networked Driver to use an encoder, but you do not set the Encoder_Resolution
value in word 6.
6) Setting the Enable_Stall_Detection Bit without configuring the Networked Driver to use an encoder.
EtherNet/IP
or PRIOFINET
Word
Modbus/TCP
Register
Configuration Data
0
0
Configuration Word 0
1
1
Mirror of Output Data Config Word
2
2
Mirror of Starting Speed.
3
3
4
4
Mirror of Motor_Resolution
5
5
0
6
6
Mirror of Encoder_Resolution
7
7
Mirror of Idle_Current_Reduction
8
8
Mirror of Motor Current (X10)
9
9
Mirror of Current Loop Gain







































































