





























20 Gear Drive, Plymouth Ind. Park, Terryville, CT 06786
Tel: (860) 585-1254 Fax: (860) 584-1973 http://www.amci.com
Networked Indexer/Driver User Manual
M
OTION
C
ONTROL
27
Controlled and Immediate Stops
Once a move is started, there are several ways to stop the move before it comes to an end. These stops are
broken down into two types:
Controlled Stop:
The axis immediately begins decelerating at the move’s programmed deceleration
value until it reaches the configured Starting Speed. The axis stops at this point. The motor position
value is still considered valid after a Controlled Stop and the machine does not need to be homed again
before Absolute Moves can be run.
Immediate Stop:
The axis immediately stops motion regardless of the speed the motor is running at.
Since it is possible for the inertia of the load attached to the motor to pull the motor beyond the stopping
point, the motor position value is considered invalid after an Immediate Stop. The machine must be
homed or the position must be preset before Absolute Moves can be run again.
Host Control
Hold Move Command:
This command can be used with some moves to bring the axis to a Controlled Stop.
The move can be resumed and finished, or it can be aborted. Not all moves are affected by this command. The
section
, starting on page 27, describes each move type in detail, including if the move is
affected by this command.
Immediate Stop Command:
When this command is issued from the host, the axis will come to an Immedi-
ate Stop. The move cannot be restarted and the machine must be homed again before Absolute Moves can be
run.
Hardware Control
CW Limit and CCW Limit Inputs:
In most cases, activating these inputs during a move will bring the axis to
an Immediate Stop. The exceptions are the
CW/CCW Find Home
commands, the
CW/CCW Jog Move
com-
mands, and the
CW/CCW Registration Move
commands. The
Find Home
commands are explained in the ref-
erence section,
Homing an AMCI Networked Driver
, which starts on page 55. The
commands are fully explained on page 29, and the
commands are fully
explained on page 31.
Emergency Stop Input:
It is possible to configure an input as an Emergency Stop Input. When an Emer-
gency Stop Input is activated, the axis will come to an Immediate Stop, regardless of the direction of travel.
Note that power is not removed from the motor.
Basic Move Types
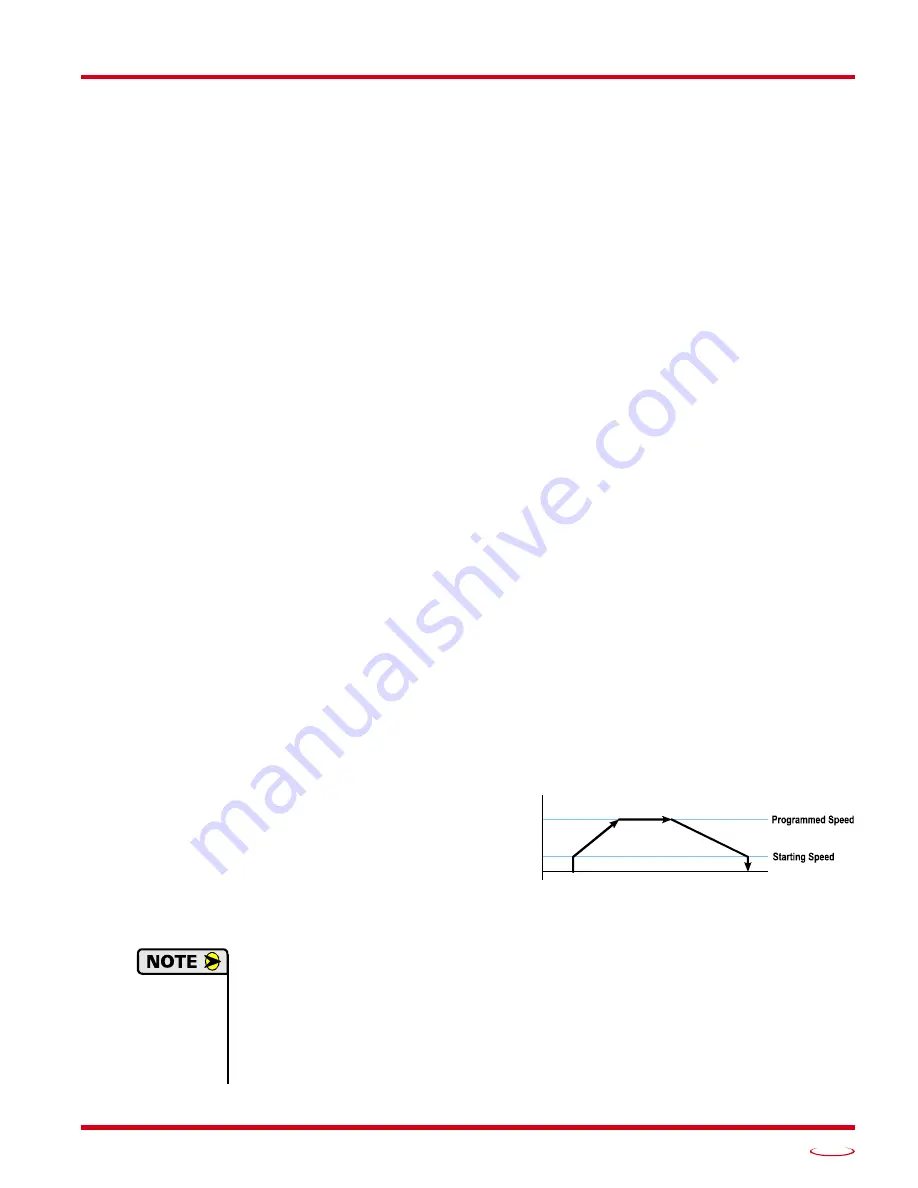
Relative Move
Relative Moves move an offset number of steps (n)
from the Current Position (A). A trapezoidal profile is
shown to the right, but Relative Moves can also gener-
ate triangular profiles. The command’s Target Position
is the move’s offset. The offset can be in the range of
±8,388,607 counts. Positive offsets will result in
clockwise moves, while negative offsets result in
counter-clockwise moves.
1) You do not have to preset the position or home the machine before you can use a Relative
Moves. That is, the Position_Invalid status bit can be set.
2) Relative Moves allow you to move your machine without having to calculate absolute posi-
tions. If you are indexing a rotary table, you can preform a relative move of 30° multiple
times without recalculating new target positions in your controller. If you perform the same
action with Absolute Moves, you would have to calculate your 30° position followed by
your 60° position, followed by your 90° position, etc.
SP
E
E
D
POSITION
A
A+n
Figure R3.6 Relative Move







































































