





























20 Gear Drive, Plymouth Ind. Park, Terryville, CT 06786
Tel: (860) 585-1254 Fax: (860) 584-1973 http://www.amci.com
Networked Indexer/Driver User Manual
M
OTION
C
ONTROL
33
Basic Move Types (continued)
Encoder Registration Move (continued)
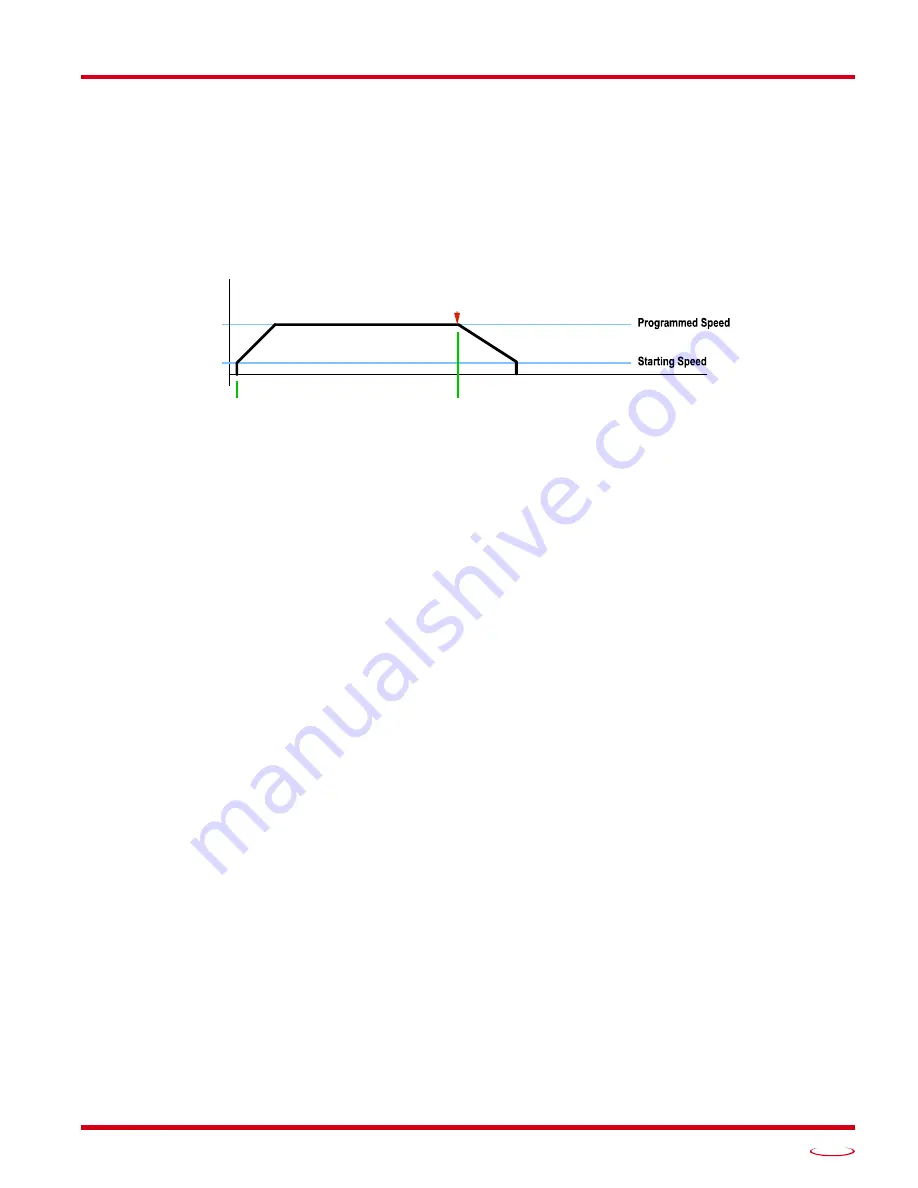
The figure below represents either a relative Encoder Registration Move of 11,000 counts or an absolute
Encoder Registration Move to position 16,000. The figure shows that the encoder position you program in the
move defines the point at which the motor begins to decelerate and stop.
It does not define the stopping posi-
tion as it does in other move types.
The endpoint of the move depends on the speed of the motor when the
programmed encoder position is reached and the deceleration values. This behavior is different from Abso-
lute and Relative Moves where the position you program into the move is the end point of the move.
Figure R3.11 Encoder Registration Move
Controlled Stop Conditions
The move completes without error
You toggle the Hold_Move control bit in the Network Output Data. Note that your holding position will
most likely not be the final position you commanded. You can resume a held Encoder Registration
Move by using the Resume_Move bit. The use of the Hold_Move and Resume_Move bits is explained
in the
section starting on page 40.
Immediate Stop Conditions
The Immediate_Stop bit makes a 0
1 transition in the Network Input Data.
A positive transition on an input configured as an E-Stop Input.
A CW/CCW Limit Switch is reached. If the limit that is reached is the same as the direction of travel,
for example, hitting the CW limit while running a CW move, a
Reset Errors
command must be issued
before moves are allowed in that direction again. If the limit that is reached is opposite the direction of
travel, a
Reset Errors
command does not have to be issued.
Assembled Moves
All of the moves explained so far must be run individually to their completion or must be stopped before
another move can begin. The Networked Driver also gives you the ability to pre-assemble more complex pro-
files from a series of relative moves that are then run with a single command. Each Assembled Move can con-
sist of 2 to 16 segments. Two types of Assembled Moves exist in a Networked Driver:
Blend Move -
A Blend Move gives you the ability to string multiple relative moves together and run all
of them sequentially without stopping the shaft between moves. A Blend Move can be run in either
direction, and the direction is set when the move command is issued.
Dwell Move -
A Dwell Move gives you the ability to string multiple relative moves together, and the
Networked Driver will stop between each move for a programed
Dwell Time
. Because motion stops
between each segment, a Dwell Move allows you to reverse direction during the move.
SPE
ED
POSITION
5,000
16,000
Programmed
Encoder Position







































































