
























2.3.5 Loads fitted to the robot, stopping time and braking distances
General
Any loads mounted on the robot must be defined correctly and carefully (with
regard to the position of center of gravity and mass moments of inertia) in order
to avoid jolting movements and overloading motors, gears and structure.
CAUTION
Incorrectly defined loads may result in operational stops or major damage to the
robot.
References
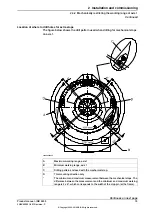
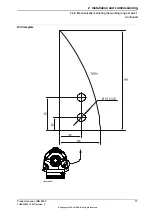
Load diagrams, permitted extra loads (equipment) and their positions are specified
in the product specification. The loads must be defined in the software.
•
User’s guide - S4Cplus (BaseWare OS 4.0)
•
Operating manual - IRC5 with FlexPendant
Stopping time and braking distances
The performance of the motor brake depends on if there are any loads attached
to the robot. For more information, see product specification for the robot.
Product manual - IRB 2400
65
3HAC022031-001 Revision: P
© Copyright 2004-2018 ABB. All rights reserved.
2 Installation and commissioning
2.3.5 Loads fitted to the robot, stopping time and braking distances
Summary of Contents for IRB 2400 Series
Page 1: ...ROBOTICS Product manual IRB 2400 ...
Page 8: ...This page is intentionally left blank ...
Page 18: ...This page is intentionally left blank ...
Page 204: ...This page is intentionally left blank ...
Page 220: ...This page is intentionally left blank ...
Page 232: ...This page is intentionally left blank ...
Page 234: ...This page is intentionally left blank ...
Page 240: ......
Page 241: ......





















































