












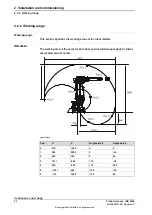















IRB 2400/10, /16
The working area is the same for both floor and inverted (suspended). Positions
are located at wrist center.
xx0200000160
Angle axis 3
Angle axis 2
Z
X
Pos.
0
0
1455
855
0
-60
0
2041
360
1
65
0
693
541
2
-60
110
-118
1351
3
18.3
110
-302
400
4
-60
-100
624
-1350
5
65
-100
1036
-53
6
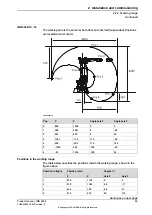
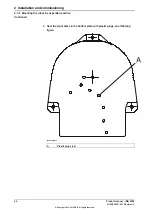
Positions in the working range
The table below specifies the positions inside the working range, shown in the
figure above.
Angles (º)
Position (mm)
Position in figure
Axis 3
Axis 2
Z
X
0
0
1139
870
1
-17
-28
1246
510
2
31
-28
722
446
3
119
60
218
515
4
Continues on next page
Product manual - IRB 2400
55
3HAC022031-001 Revision: P
© Copyright 2004-2018 ABB. All rights reserved.
2 Installation and commissioning
2.2.2 Working range
Continued
Summary of Contents for IRB 2400 Series
Page 1: ...ROBOTICS Product manual IRB 2400 ...
Page 8: ...This page is intentionally left blank ...
Page 18: ...This page is intentionally left blank ...
Page 204: ...This page is intentionally left blank ...
Page 220: ...This page is intentionally left blank ...
Page 232: ...This page is intentionally left blank ...
Page 234: ...This page is intentionally left blank ...
Page 240: ......
Page 241: ......





















































