





















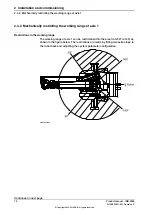




2.3.3 Orienting and securing the robot
General
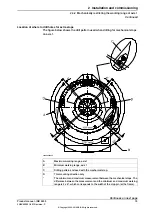
This section details how to orient and secure the robot to the foundation in order
to safely run the robot. The requirements for the foundations are shown in
Requirements, foundation on page 52
For suspended mounting, see
Setting the system parameters for a suspended or
Bolting requirements
When bolting a base plate or the base to a concrete floor, follow the general
instructions for expansion-shell bolts. The screw joint must be able to withstand
the stress loads defined in section
Pre-installation procedure on page 50
.
Note
When the robot is to be mounted in a tilted or a suspended position, the guide
sleeves must be used to secure the bolted joint.
Attachment screws
The table below specifies the type of securing screws and washers to be used for
securing the robot to the base plate/foundation.
M16 x 50
Suitable screws, lightly lubricated:
Quality 8.8
Quality
Thickness: 3 mm
Suitable washer:
Outer diameter: 30 mm
Inner diameter: 17 mm
190 Nm
Tightening torque:
Continues on next page
Product manual - IRB 2400
61
3HAC022031-001 Revision: P
© Copyright 2004-2018 ABB. All rights reserved.
2 Installation and commissioning
2.3.3 Orienting and securing the robot
Summary of Contents for IRB 2400 Series
Page 1: ...ROBOTICS Product manual IRB 2400 ...
Page 8: ...This page is intentionally left blank ...
Page 18: ...This page is intentionally left blank ...
Page 204: ...This page is intentionally left blank ...
Page 220: ...This page is intentionally left blank ...
Page 232: ...This page is intentionally left blank ...
Page 234: ...This page is intentionally left blank ...
Page 240: ......
Page 241: ......





















































