




























5.6 Internal Set Speed Control
5-55
5
Ope
rat
ion
5.6.2
Example of Operating with Internal Set Speeds
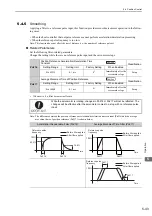
An operating example of speed control with the internal set speeds is as shown below.
This example combines speed control with the internal set speeds with the soft start function.
The shock that results when the speed is changed can be reduced by using the soft start function.
- SPEED1
Servomotor speed
+SPEED3
+SPEED2
+SPEED1
- SPEED2
- SPEED3
0
OFF
ON
Stop
/P-CL (/SPD-A)
/N-CL (/SPD-B)
/P-CON( /SPD-D)
Stop
Stop
OFF
OFF
OFF
OFF
OFF
OFF
OFF
OFF
OFF
OFF
OFF
ON
ON
ON
ON
ON
ON
ON
ON
ON
ON
ON
OFF
OFF
OFF
Acceleration/deceleration are
done for the soft start times set in
Pn305 and Pn306.
1st speed
1st speed
2nd speed
2nd speed
3rd speed
3rd speed
Analog





















































