





























4.3 Trial Operation for Servomotor without Load from Host Reference
4-7
4
Tri
al Op
eration
4.3.2
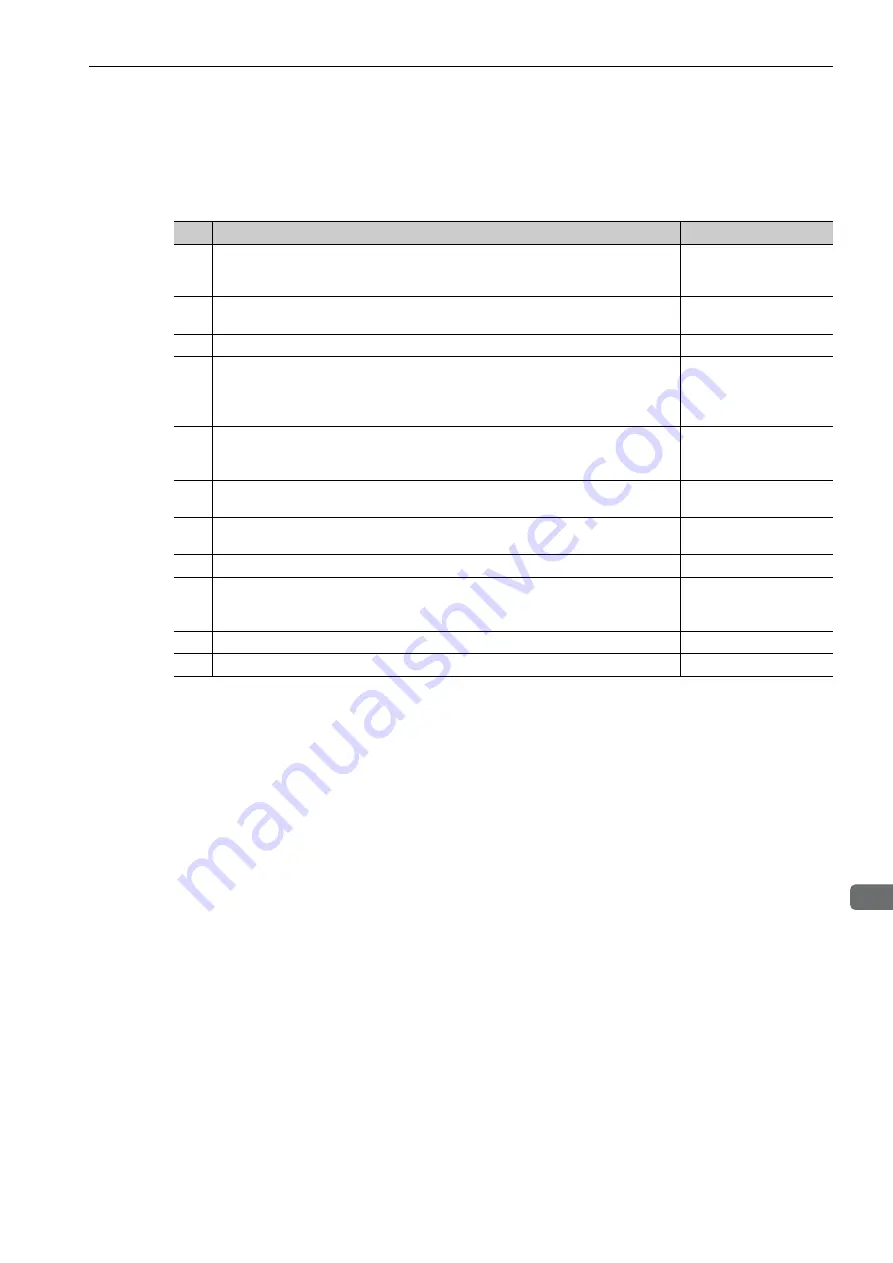
Trial Operation in Speed Control
Perform the following steps for trial operation in speed control. The steps are specified on the condition that
input signal wiring for the speed control has been completed according to
4.3.1 Inspecting Connection and
Status of Input Signals
.
Step
Operation
Reference
1
Recheck the power supply and the input signal circuits, and turn ON the control
power supply of the SERVOPACK and converter.
3.3.3 Example of I/O Sig-
nal Connections in Speed
Control
2
Adjust the speed reference input gain (Pn300).
5.3.1 Basic Settings for
Speed Control
3
Turn ON the main circuit power supply of the SERVOPACK and converter.
−
4
Check that speed reference input (the voltage between V-REF and SG) is 0 V, and
turn ON the servo ON (/S-ON) input signal.
Note: If the servomotor rotates at a very low speed with the speed reference input at
0 V, adjust the reference offset so that the servomotor will not rotate.
5.3.2 Reference Offset
Adjustment
5
Gradually increase the voltage of the speed reference input (i.e., the voltage between
V-REF and SG) from 0 V.
Note: The factory setting is 6 V at the rated speed.
5.3.1 Basic Settings for
Speed Control
6
Check the speed reference value using the monitor display (Un001).
8.1 List of Monitor Dis-
plays
7
Check the motor rotating speed using the monitor display (Un000).
8.1 List of Monitor Dis-
plays
8
Check that the values in step 6 and step 7 (Un001 and Un000) are equal to each other.
−
9
Check the motor rotation direction.
Note: To switch the motor rotation direction without changing the polarity of the
analog speed reference, refer to
5.2.2 Servomotor Rotation Direction
5.2.2 Servomotor Rota-
tion Direction
10
Return the speed reference input to 0 V.
−
11
Turn OFF the servo ON signal (/S-ON).
−