





























SYSTEM DESCRIPTION
3
27
8020776/12AX / 2019-05-31|SICK
Subject to change without notice
O P E R A T I N G I N S T R U C T I O N S |Free Flow Profiler
3.3.2
Operating principle of the function for calculating the vehicle dimensions
The Traffic Controller FPS combines the individual 2D sections of the vehicle. When the
speed and the position of the vehicle on the measured section are taken into account,
a 3D point cloud can be generated and the Traffic Controller FPS can then use this to
determine the vehicle dimensions.
With the standard version of the profiling system, the vehicle dimensions are
calculated
in accordance with the following formulas:
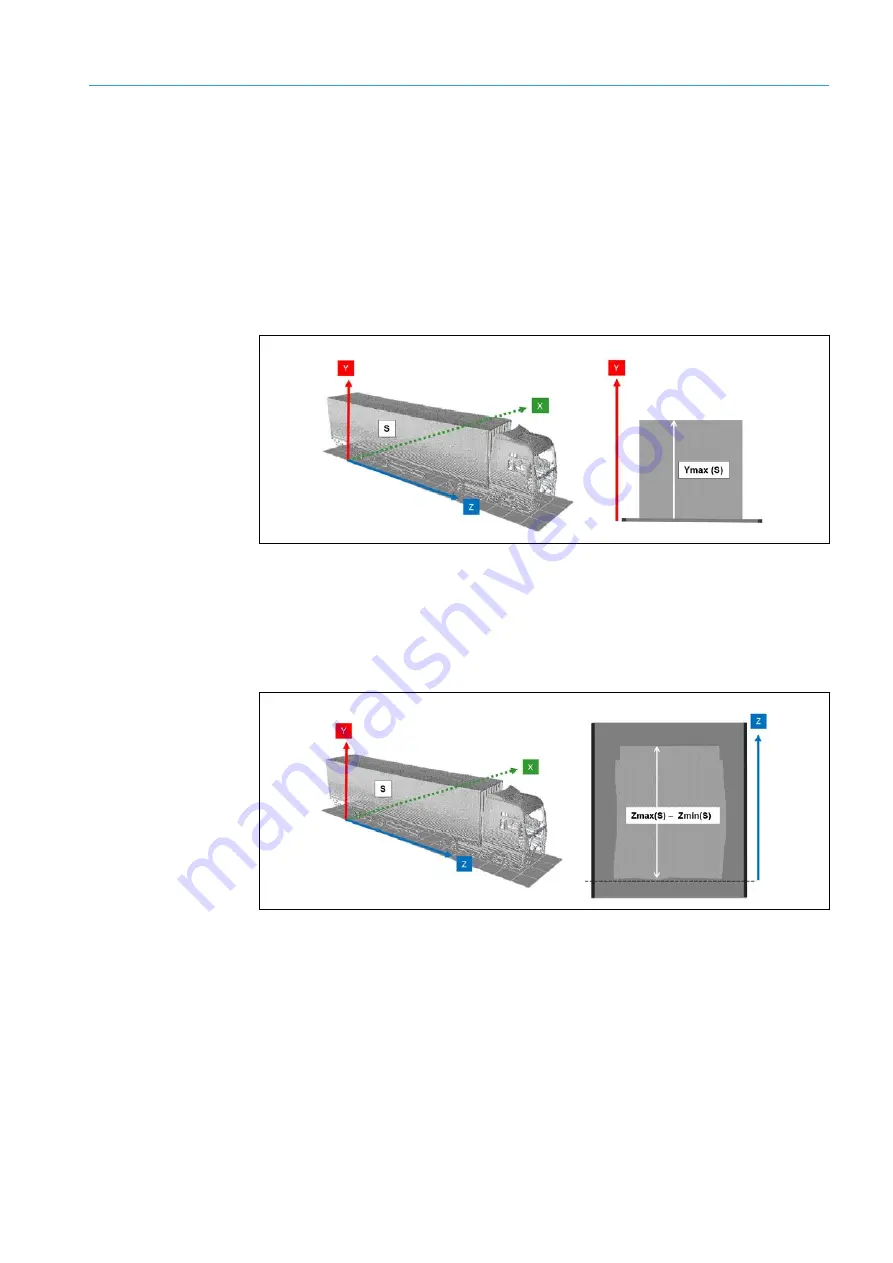
Height = Ymax(S)
Fig. 15: Dimensioning operating principle – Height
The maximum vehicle height is determined from the maximum Y value of the
3D point cloud
S
.
Length = Zmax(S) – Zmin(S)
Fig. 16: Dimensioning operating principle – Length
The maximum vehicle length is calculated by subtracting the minimum Z value from the
maximum Z value of the 3D point cloud
S
.







































































