





























3
SYSTEM DESCRIPTION
30
8020776/12AX / 2019-05-31|SICK
O P E R A T I N G I N S T R U C T I O N S | Free Flow Profiler
Subject to change without notice
3.3.4
Operating principle of the vehicle axle counting function
The 2D LiDAR sensor for counting the number of axles is mounted at the edge of the lane
and captures the side of the passing vehicle. In order to count the number of axles and
(where applicable) locate their positions, the system also needs to access the measuring
points of the 3D point cloud.
Determining the number of axles
•
In order to determine the number of axles, the first step is to analyze point patterns of
the wheels and shadow patterns on the roadway. Combining the two analysis methods
helps to achieve a high level of measurement accuracy.
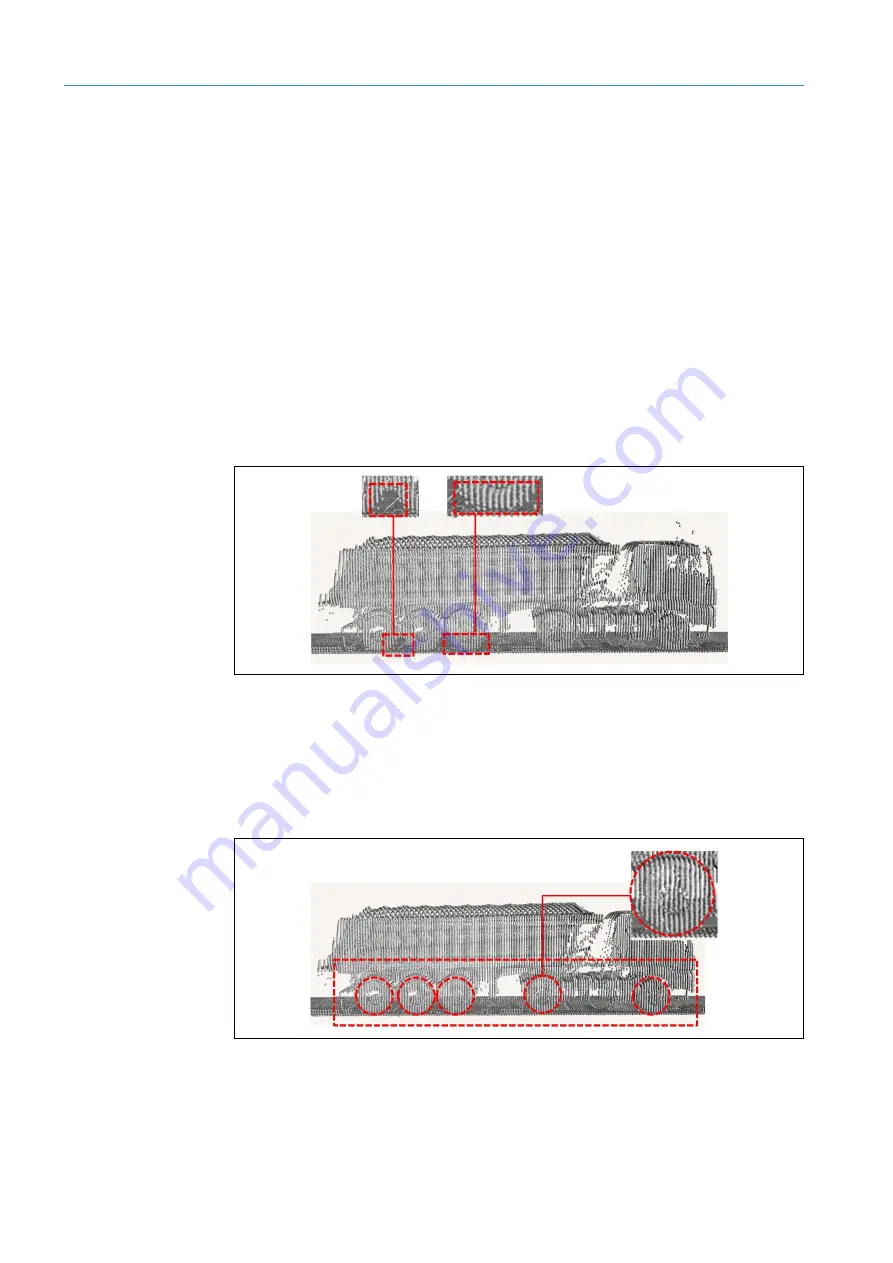
The areas containing wheels (and, by implication, axles) can be expected to generate
very few measurement points, if any at all.
In contrast, a large number of measurement points will be detected in areas of the
vehicle where there are no wheels (and, in turn, no axles) and the 2D LiDAR sensor is
able to look “underneath” the vehicle to a certain extent.
Fig. 20: Operating principle of axle counting – Wheel detection using shadow patterns
•
In a second step, the shadow patterns undergo a plausibility check. This means that
each shadowed area is checked to see whether there is a corresponding point pattern
for a wheel.
Every wheel detected is counted as one axle. Twin wheels count as one axle. Wheels on
a raised axle (at least 10 cm above the ground) will not be counted.
Fig. 21: Operating principle of axle counting – Wheel detection using a point pattern







































































