




























168
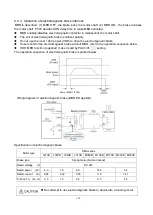
JUMP : TYPE=7, it is used to jump to the assigned PR.
Bit
31~28
27~24
23~20
19~16
15~12
11~8
7~4
3~0
PE03
X
X
DLY
X
Acc. / Dec.
OPT
7
PE04
PATH#: The assigned PRx, x=0~63
OPT
setting:
OPT
Bit 7
Bit 6
Bit 5
Bit 4
X
X
X
INS
1
0
INS=1: It indicates that the current PR would immediately replace the previous PR.
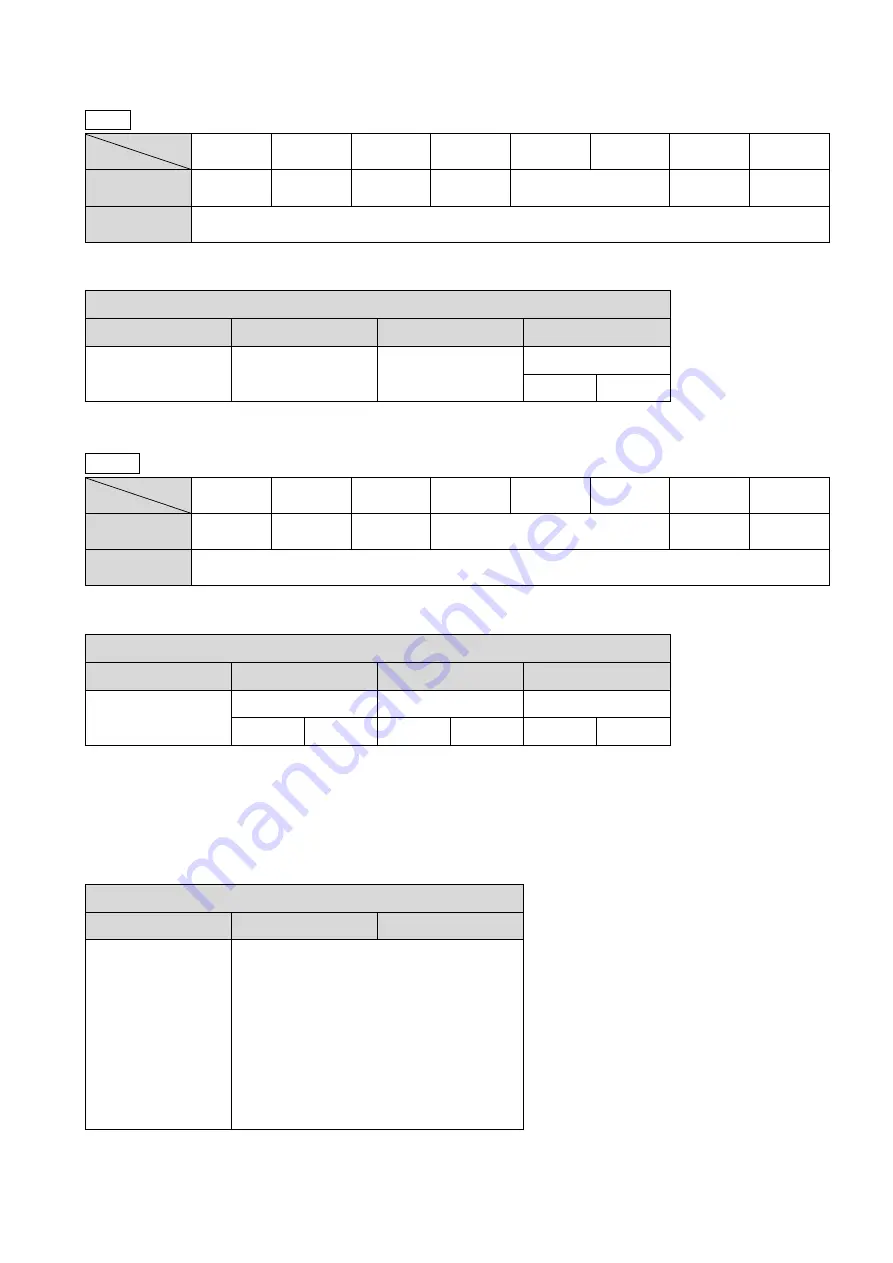
WRITE : TYPE=8, write the assigned PR to the specific parameter
Bit
31~28
27~24
23~20
19~16
15~12
11~8
7~4
3~0
PE03
X
SOUR
DLY
Destination parameters
OPT
7
PE04
Source
(constant or parameter number)
OPT
setting:
OPT
Bit 7
Bit 6
Bit 5
Bit 4
X
ROM
AUTO
INS
1
0
1
0
1
0
INS=1: It indicates that the current PR would immediately replace the previous PR.
AUTO=1: When the current PR is done, the next PR would be executed automatically.
ROM=0: The relevant parameter modification is not saved into EEPROM.
ROM=1: The relevant parameter modification will be saved into EEPROM.
Destination parameters
setting: Parameter group and number could be assigned.
OPT
Bit 19~16
Bit 15~12
Bit 11~8
Group
A
1
B
2
C
3
D
4
E
5
F
6
Parameter No.
P
□
05
05
P
□
45
45
P
□
98
98
P
□
77
77
Parameter
Parameter
Содержание SDE Series
Страница 13: ...5 1 6 Function block diagram ...
Страница 26: ...18 3 3 3 CN1 pin name list ...
Страница 212: ...204 SDE 075A2U SDE 100A2U 750W 1KW unit mm Dimensions of the servo drive may be revised without prior notice ...
Страница 223: ...215 SME L040 SME L075 SME L100 SME L150 ...
Страница 224: ...216 SME L200 SME L300 SME M100 SME M150 Continuous running range ...
Страница 225: ...217 SME M200 SME M300 NOTE These characteristic plots above are measured in case of 3φ 200 240V power supplied ...
Страница 227: ...219 ...
Страница 231: ...223 4 Wiring example with peripheral equipment CN2 Encoder socket ...
Страница 242: ...234 12 4 Version information Version V1 01 Issue date Aug 2017 Proofreader Yaochou Shu ...







































































