




















Manual – IPOSplus®
377
24
"Table positioning" sample program
Assembler – Examples
Main program table positioning
==========================================
Check for referenced axis
------------------------------------------
M50: SET H321 = 0
BMOV H321.0 = H473.20
JMP H321 != 0, M51
RET
------------------------------------------
Set travel velocity and ramp
------------------------------------------
M51: SETSYS POS.SPEED C(C)W = H300
SETSYS POS. RAMP = H302
------------------------------------------
Read in variable pointer in variable H320
------------------------------------------
SET H320 = H483
ASHR H320 > > 6
AND H320 & F hex
------------------------------------------
Check output "Table position reached"
------------------------------------------
JMP H322 == H320, M54
BCLR H480.5 = 0
M54 : SET H322 = H320
------------------------------------------
Output binary coded variable pointer
------------------------------------------
SET H323 = H320
SET H324 = H480
AND H324 & FFFFFFF0 hex
OR H323 ¦ H324
SET H480 = H323
------------------------------------------
Enable table positioning
------------------------------------------
M53: JMP LO I0010000000000000, M52
ASTOP IPOS ENABLE
GOA NOWAIT [H320]
JMP NOT IN POSITION, M53
BSET H480.5 = 1
JMP UNCONDITIONED , M55
------------------------------------------
M52: ASTOP HOLD CONTROL
M55 : RET
------------------------------------------
Table positioning end
------------------------------------------
END
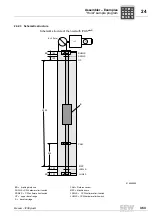
Main program table positioning
Table positions are only approached with a referenced
drive
(DO17 = 10 bit position in output terminal system vari-
able H473; parameter set to "IPOS reference")
Set travel speed, acceleration and deceleration ramp
Select table pointer (travel variable no.) binary coded
with 4 inputs (DI10 - DI13)
Reset the output "Tab. position valid" if the table
pointer has been changed. Store current table pointer
in comparison variable.
Write selected table pointer to output terminals (DO10
– DO13) without altering other outputs of the output
variable (H480)
If DI17 = 1, then travel to position value of selected
travel variable, otherwise stop drive
Reset "Table position selection valid" signal
Unlock travel
Move to table position until position is reached or DI17
= 0.
Set "Table position selection valid" signal
Stop drive
P
i
f
kVA
Hz
n
P
i
f
kVA
Hz
n