





























Manual – IPOSplus®
259
18
Touch probe interrupt processing
Compiler – Examples
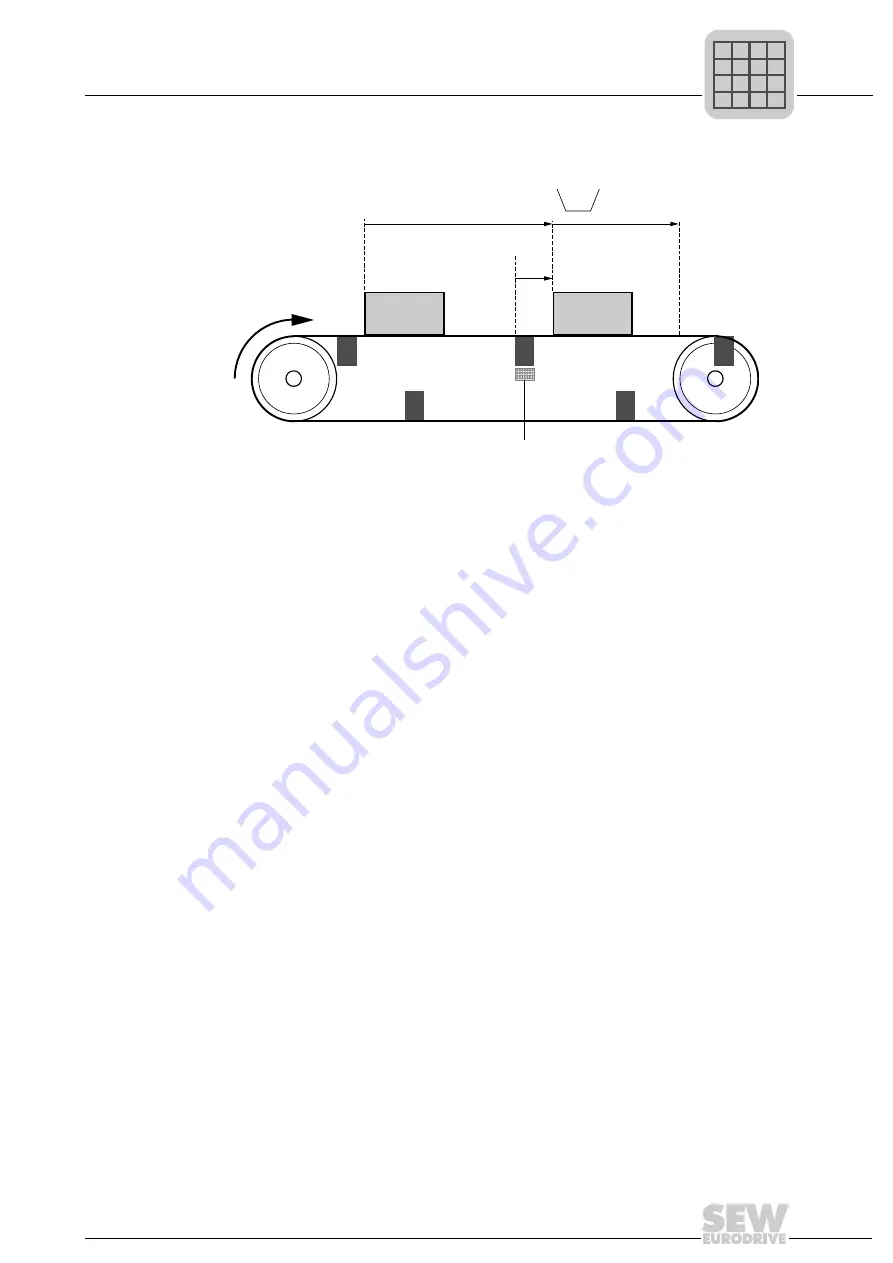
Timing belt with proximity sensor:
506321163
PD: Pulse direction
DI10 = 1: Start
PW: Pulse width
FS: Filling station
TP_Max_Pos: Maximum target position
TP: TP event
TP_Pos: Remaining travel
PTP: Position after TP event
X13:3/DI02: proximity switch
SEW: Crate on conveyor belt
/
*==============================================================================
Description:
A machine cycle is started via input DI10. The target position is the
current motor position (H511) plus TP_Max_Pos (H11). If the touch probe input
DI02
is not attenuated, the drive moves to this target position. If DI02 is attenu-
ated, a
new target position is calculated. The new target position is calculated from
the motor position
during the touch probe event TpPos1_Mot (H507) plus the remaining distance
TP_Pos (H12).
Settings in SHELL :
P601 Binary input DI02 IPOS input
P610 Binary input DI10 IPOS input
P700 Operating mode ... & IPOS
=============================================================================*/
#include <const.h>
#include <io.h>
#define CALCTARGET 0
#define BUSSY 1
#define STOP_AKTIV 2
#define State H10
#define TP_Max_Pos H11
#define TP_Pos H12
#define Speed H13
#define Ramp H14
#define h473_ipos_in_position (StatusWord & 0x00080000) //StatusWord & BIT19
long lPosition;
SEW
SEW
TP_Pos
DI10 = 1
PW
TP_Max_Pos
X13:3 / DIO2
FS
PD
TP
PTP
P
i
f
kVA
Hz
n
P
i
f
kVA
Hz
n





















































