




















Mach-DSP User’s Manual
Document Number: MACH-DSP-9021
Page 92
www.ScannerMAX.com
9.6
PDF configuration and tuning
With the PID tuning described above, the primary servo term responsible for
accelerating the motor is the Proportional term – i.e. a term that is proportional to the
error between the commanded position and actual position. The Integral term in PID
tuning is only included to try to minimize the Position Error over time. However, due to
the fact that only small amounts of Error Integral are used (low integrator gain), the
effect of the integral is only applied after a relatively long period of time – typically
several milliseconds. This means that while PID has the possibility of minimizing
position error at very low frequencies, position errors may still remain at higher
frequencies.
PDF (pseudo derivative feedback) is an alternative to PID tuning. Unlike PID where the
Position Error is used to directly accelerate the mirror (in the form of Servo gain), PDF
does not use Position Error at all (Servo gain is left at 0). Instead mirror acceleration is
achieved purely with Error Integration servo term. Ordinarily, large amounts of error
integration would make the servo loop unstable, and so a high amount of Position-
proportional gain is used to counterbalance the high integrator gain. The high integrator
gain ultimately means that the position error is constantly being minimized, as opposed
to only being minimized at very low frequencies. PDF is sometimes referred to as a
“third-order tune”.
To prepare for PDF tuning, complete steps A through H in Section 10.2 above.
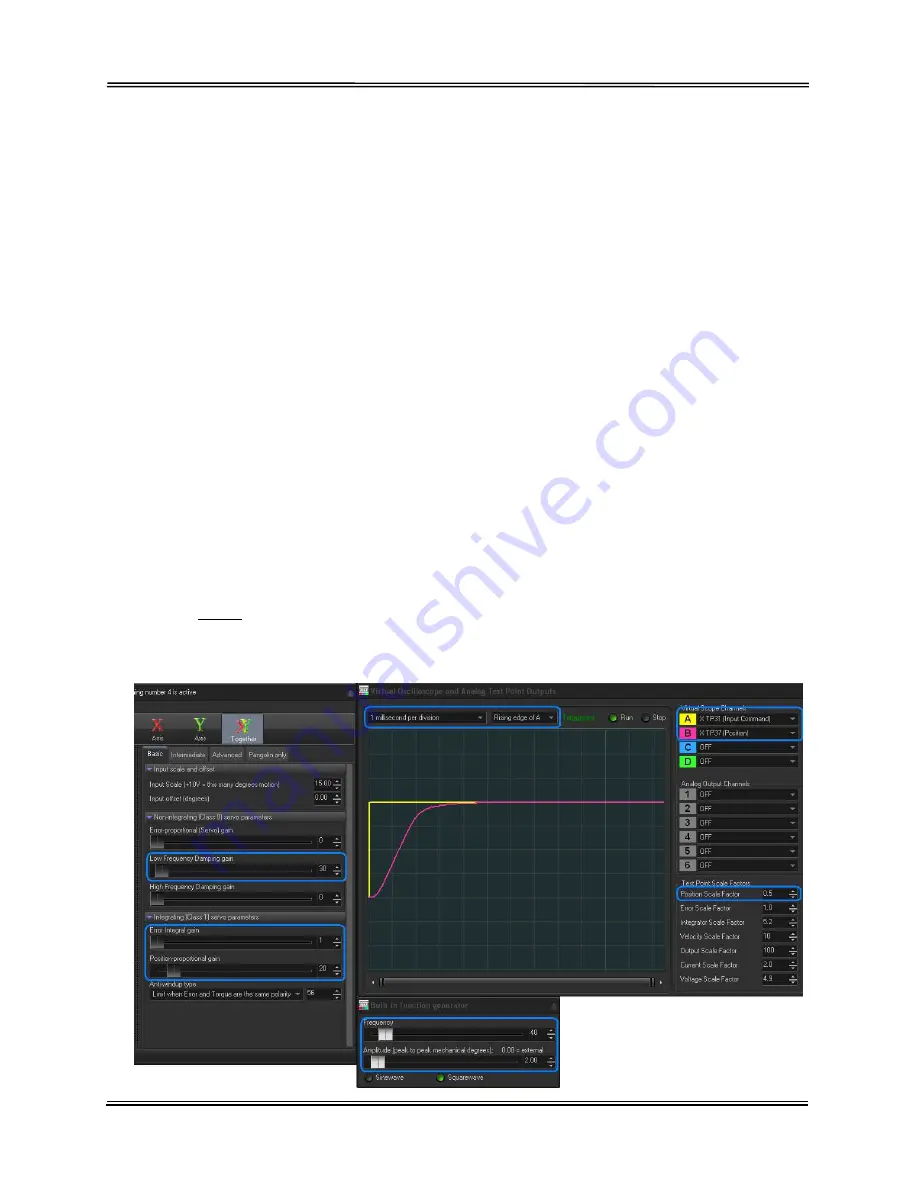
I.
On the Basic tab, set Low Frequency Damping to 30 and set Position-proportional
gain to 20. Then set Error Integral gain to 1. You should see something very similar
to the screen shot below, which may or may not include a bit of overshoot.







































































