





























Mach-DSP User’s Manual
Document Number: MACH-DSP-9021
Page 31
www.ScannerMAX.com
The function of each of these parameters is described below:
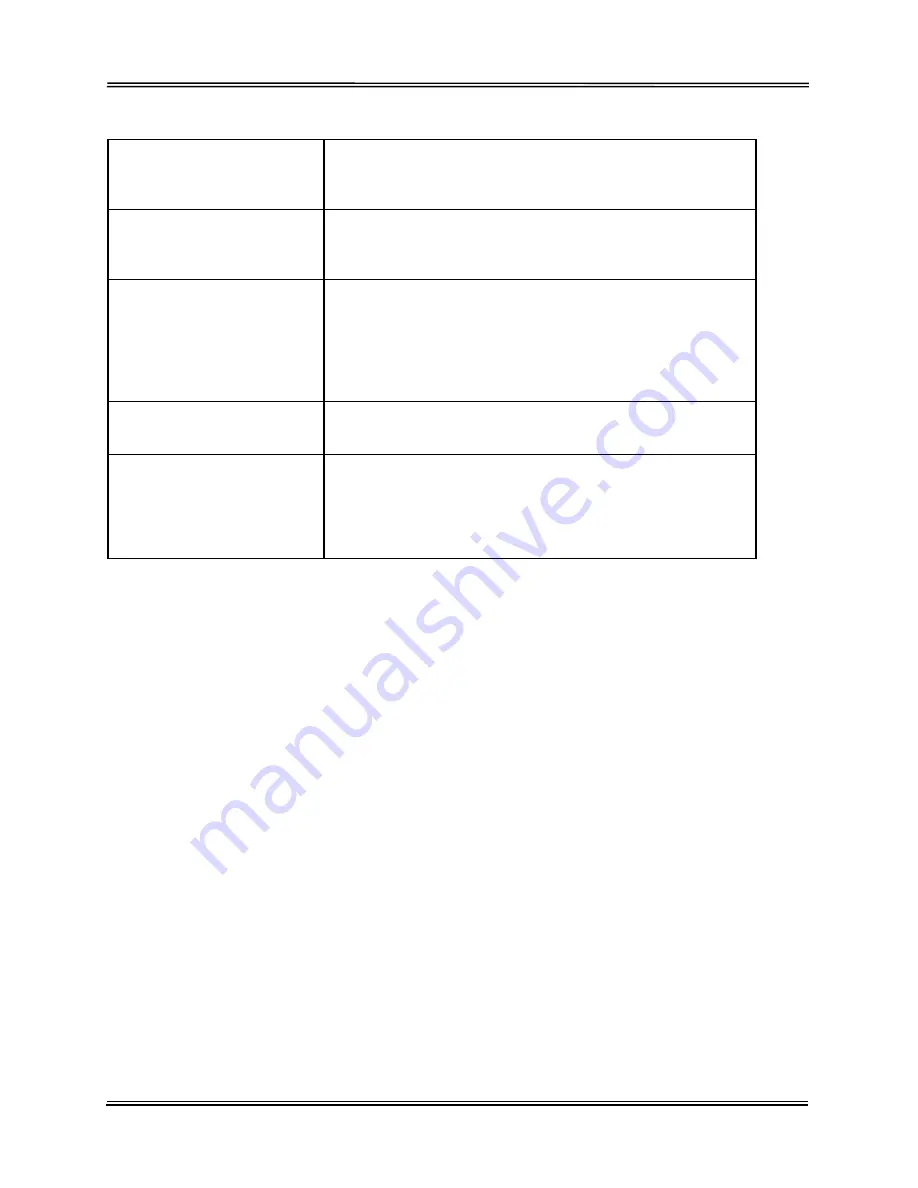
Servo Gain:
(Error Proportional)
The Servo Gain term provides current to the scanner in
proportion to the difference between the commanded and
actual position (i.e. proportional to the position error). This
allows quick acceleration of the scanner.
Error Integrator Gain:
The Integrator Gain term provides nearly infinite gain at DC,
allowing the servo to achieve zero error for a constant or
slowly-changing input command, and maintains a constant
tracking offset for a constant velocity command.
Position-Proportional Gain:
The Position-Proportional term feeds an inverted portion of the
scanner position signal into the servo loop. This tends to act
like an electronic spring, having a K factor equal to the
Position Proportional Gain setting. Position Proportional can
serve to balance the Error Integrator and keep it from winding
up. This is particularly useful for PDF and PDFF servo
configurations.
Low-Frequency Damping
(Differentiated Position):
The low frequency damping term is obtained by differentiating
the position signal, thus deriving a primary source of scanner
velocity. This is used to maintain loop stability.
High-Frequency Damping
(Integrated Current):
The high frequency damping term is obtained by integrating
the drive current flowing through the scanner coil, thus
deriving a secondary source of scanner velocity. High-
frequency Damping is generally not accurate down to DC and
therefore most often both Low-frequency damping and High-
frequency damping are used together.
These five servo parameters allow the Mach-DSP to be configured as a Class 0 PD
amplifier, a CLASS 1 PID amplifier, a CLASS 1 PDF amplifier, or a CLASS 1 PDFF
amplifier. For the Mach-DSP, the only difference between all of these different servo
configurations is which of the servo parameters above are used, and to what level they
are tuned.







































































