


























Mach-DSP User’s Manual
Document Number: MACH-DSP-9021
Page 86
www.ScannerMAX.com
similar to Servo Gain, and thus increasing any of these must be met with some increase
of Low-Frequency Damping and High-Frequency Damping.
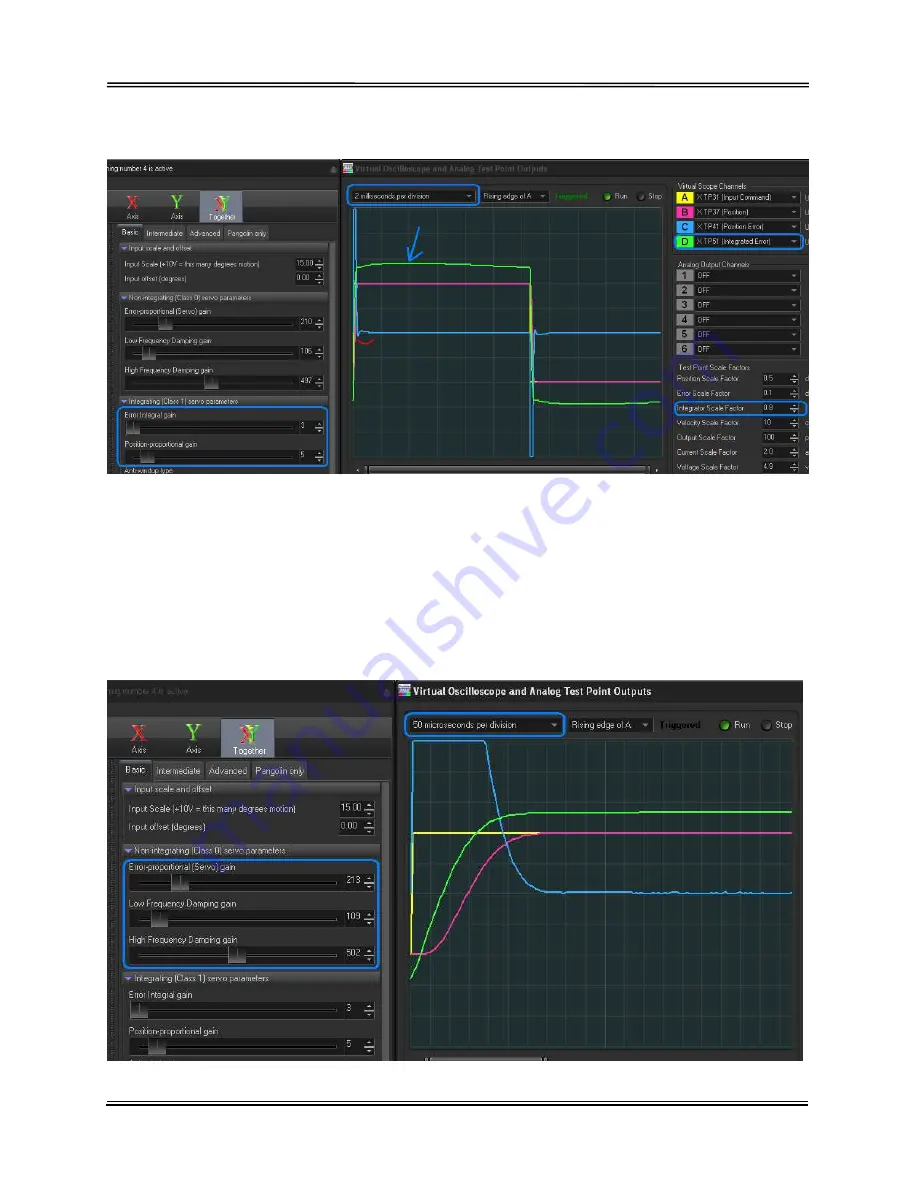
Also note the Integrated Error trace shown above in green. For a squarewave input,
ideally this should also be a squarewave – essentially having flat tops. If this is slanting
upward or downward, it shows that integration must be increasing or decreasing over
time to try to correct the mirror position.
By changing the Oscilloscope to 50 microseconds per division, and then further
tweaking Servo gain, Low-Frequency Damping and High-Frequency Damping, perfect
results can be obtained.







































































