





























8. FUNCTIONS
IMS01J02-E4
173
(2) PID Control (Closed loop control)
If a deviation between the motor speed measured value and set value is within the control range set
value, and the H-SIO-A open/closed loop control transfer is “0: Closed loop control,” the instrument
performs PID control.
PI control (factory set value, derivative time: 0) is recommended in case of speed control.
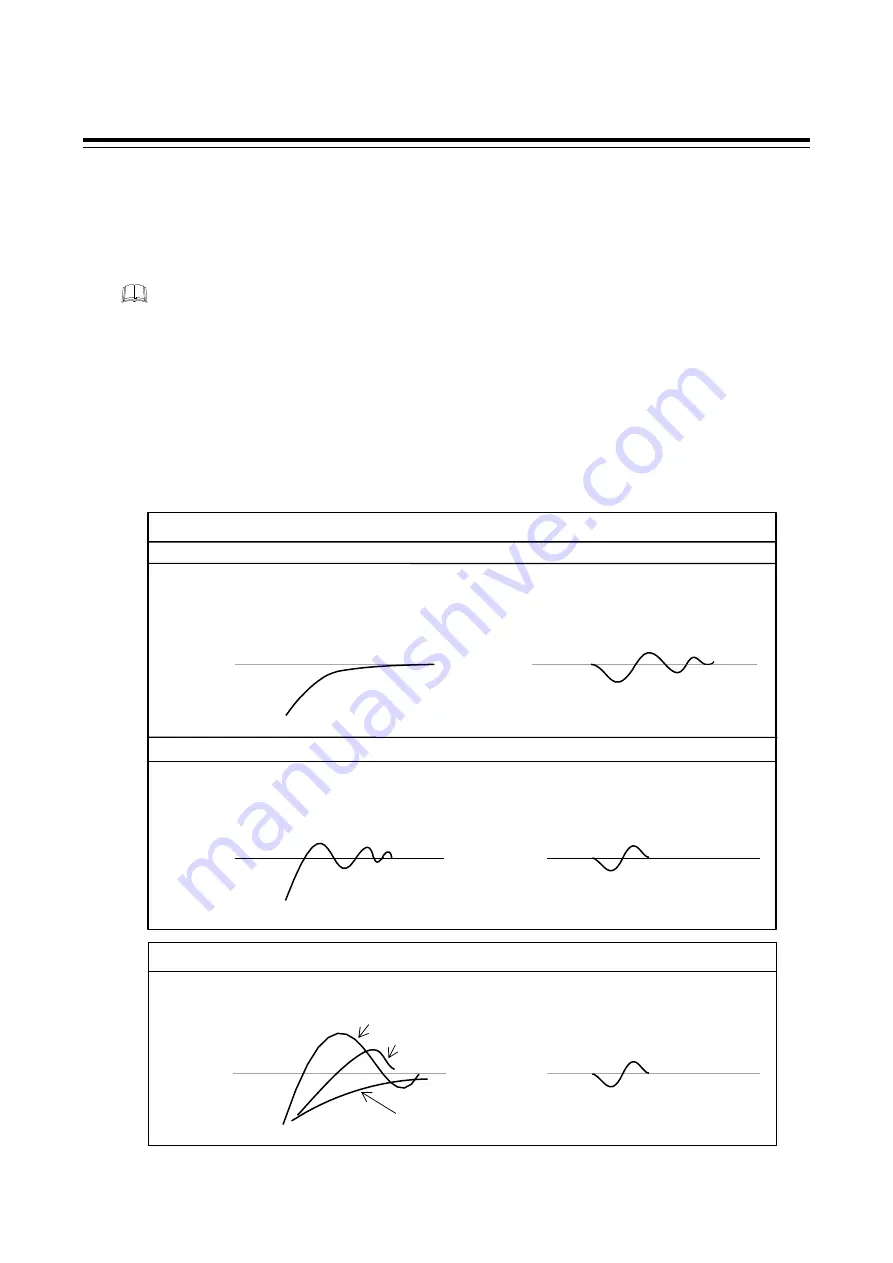
Brilliant PID control
PID control is a control method of achieving stabilized control result by setting P (Proportional band),
I (Integral time) and D (Derivative time) constants, and is widely used. However even in this PID
control if P, I and D constants are set so as to be in good “response to setting,” “response to
disturbances” deteriorates. In contrast, if PID constants are set so as to be in good “response to
disturbances,” “response to setting” deteriorates. In brilliant PID control a form of “response to
setting” can be selected from among
Fast
,
Medium
and
Slow
with PID constants remaining
unchanged so as to be in good “response to disturbances.”
Ordinary PID
P, I and D constants set so as to be in good response to set value change
Response to set value change
Response to disturbance change
Set value
Set value
Set value
Set value
Set value
Set value
P, I and D constants set so as to be in good response to disturbance
Brilliant PID control
Fast
Medium
Slow
Response to set value change
Response to disturbance change
Response to set value change
Response to disturbance change







































































