





























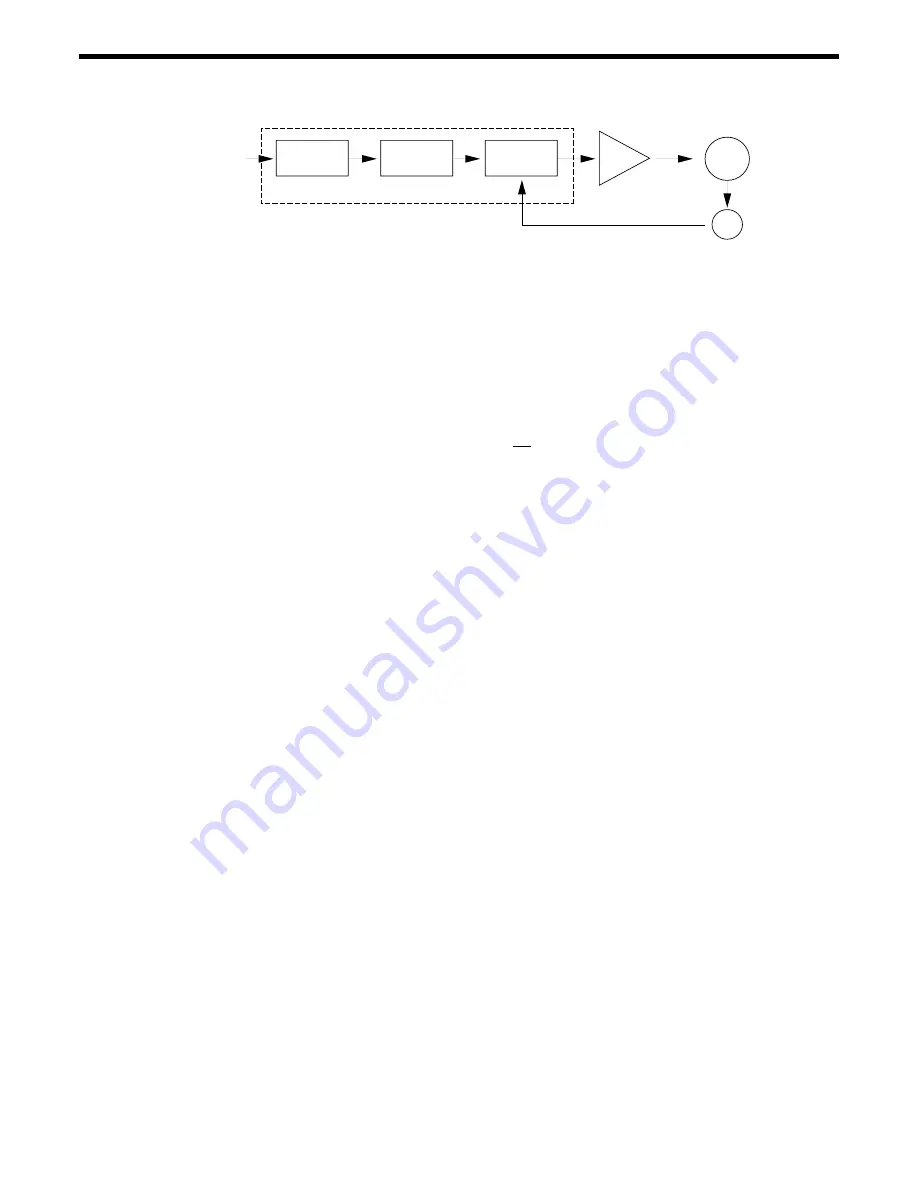
Command
Interpreter
Trajectory
Generator
Motion Controller
Servo
Controller
Driver
Motor
Encoder
Figure 5.13: Servo Loop
5.3.1 PID Servo Loops
The PID term comes from the proportional, integral and derivative
gain factors that are at the basis of the control loop calculation. The
common equation given for it is:
K
p
•
e + K
i
∫
e dt + K
d
•
de
dt
The program for most users is to get a feeling for this formula,
especially when trying to tune the PID loop. Tuning the PID means
changing its three gain factors to obtain a certain system response,
task quite difficult to achieve without some understanding of its
behavior of servo loops.
where:
K
p
= Proportional gain factor
K
I
= integral gain factor
K
d
= derivative gain factor
e
= instantaneous following factor
The following paragraphs explain the PID components and their
operation.
P Loop
Lets start with the simplest type of closed loop, the P (proportional)
loop. The diagram in (
Figure 5.14)
shows its configuration.
Every servo cycle, the actual position, as reported by the encoder, is
compared to the desired position generated by the trajectory
generator. The difference
e
is the positioning error (the following
error). Amplifying it (multiplying it by
K
p
) generates a control signal
that, converted to an analog signal, is sent to the motor driver.
There are a few conclusions that could be drawn from studying this
circuit:
•
The motor control signal, thus the motor voltage, is proportional
to the following error.
•
There must be a following error in order to drive the motor.
5-14
Section
5
–
Motion
Control
Tutorial
Содержание ESP300 Series
Страница 1: ...ESP300 Motion Controller Driver User s Manual...
Страница 4: ...ESP300 1999 EU Declaration of Conformity iv Preface...
Страница 29: ...This page is intentionally left blank Section 2 Modes of Operation 1 15...
Страница 30: ......
Страница 230: ...4 16 Section 4 Advanced Capabilities...
Страница 274: ...This page is intentionally left blank 6 6 Section 6 Servo Tuning...
Страница 290: ...This page is intentionally left blank B 6 Appendix B Trouble Shooting and Maintenance...