





























CHAPTER 19 FCAN CONTROLLER (V850/SC3)
User’s Manual U15109EJ3V0UD
650
19.11.5 CAN sleep mode/CAN stop mode function
The CAN sleep mode/CAN stop mode function can be used to set the FCAN controller to sleep (standby) mode to
reduce power consumption.
The CAN sleep mode is set via the procedure stipulated in the CAN specifications. The CAN sleep mode can be
set to either wake up or not wake up when the bus is operated (this is controlled via CPU access).
19.11.6 Error control function
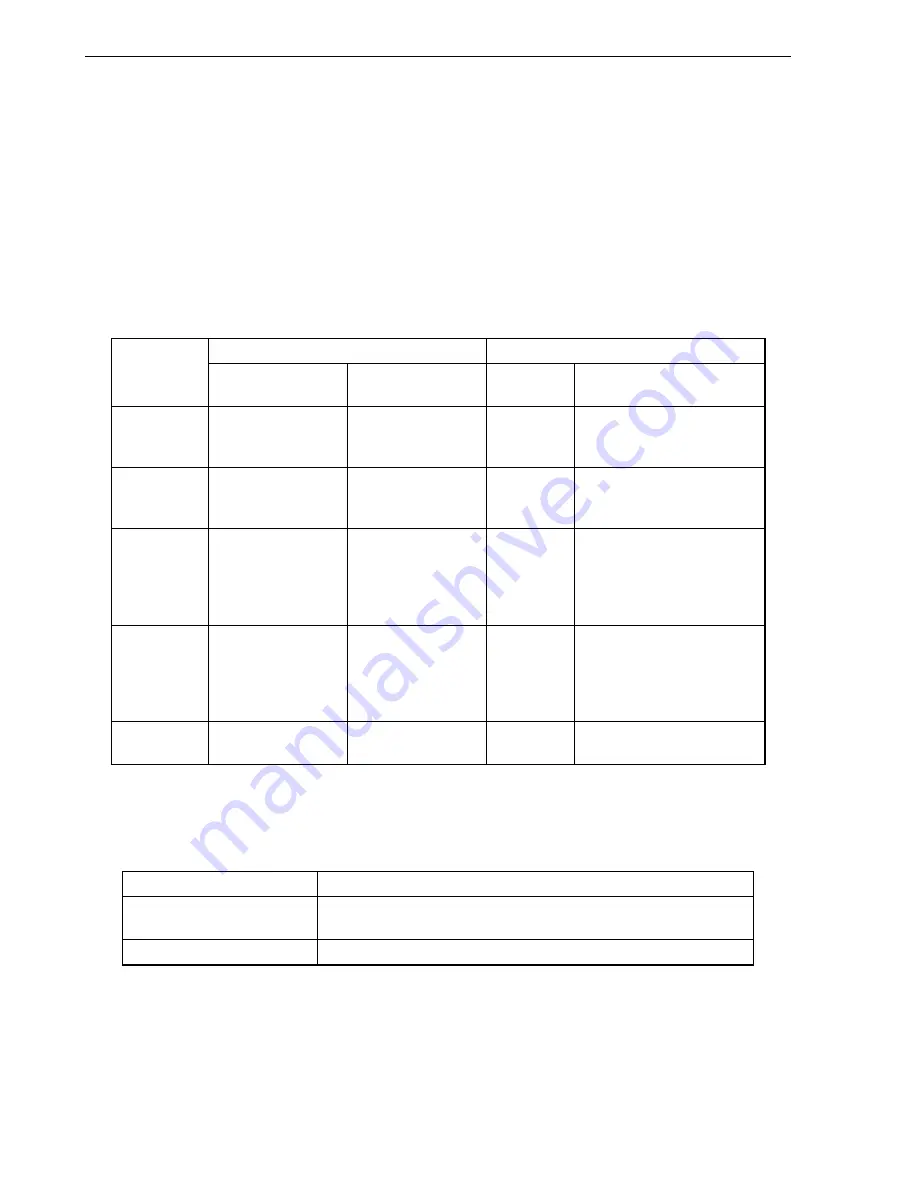
(1) Types of errors
Table 19-26. Types of Errors
Description of Error
Detected Status
Error Type
Detection Method
Detection Condition
Transmit/
Receive
Field/Frame
Bit error
Comparison of output
level and bus level
(excludes stuff bits)
Mismatch between
levels
Transmitting/
receiving
nodes
Bus output of data from bits in
start of frame to end of frame,
error frame, or overload frame
Stuff error
Use stuff bits to check
receive data
Six consecutive bits of
same-level data
Transmitting/
receiving
nodes
Start of frame to CRC sequence
CRC error
Comparison of CRC
generated from
receive data and
received CRC
sequence
CRC mismatch
Receiving
node
Start of frame to data field
Form error
Check fixed-format
field/frame
Detection of inverted
fixed format
Receiving
node
•
CRC delimiter
•
ACK field
•
End of frame
•
Error frame
•
Overload frame
ACK error
Use transmitting node
to check ACK slot
Use ACK slot to
detect recessive level
Transmitting
node
ACK slot
(2) Error frame output timing
Table 19-27. Error Frame Output Timing
Error Type
Output Timing
Bit error, stuff error, form error,
ACK error
Error frame is output at the next bit following the bit where error was detected
CRC error
Error frame is output at the next bit following the ACK delimiter
(3) Handling of errors
The transmitting node retransmits the data frame or remote frame after the error frame has been transmitted.





















































